Аналоговый сигнал
Содержание:
Цели обработки сигналов.
Главная цель обработки сигналов заключается в необходимости получения содержащейся в них
информации. Эта информация обычно присутствует в амплитуде сигнала (абсолютной или относительной),
в частоте или в спектральном составе, в фазе или в относительных временных зависимостях
нескольких сигналов.
Как только желаемая информация будет извлечена из сигнала, она может быть использована
различными способами. В некоторых случаях желательно переформатировать информацию, содержащуюся
в сигнале.
В частности, изменение формата сигнала происходит при передаче звукового сигнала в телефонной
системе с многоканальным доступом и частотным разделением (FDMA). В этом случае используются
аналоговые методы, чтобы разместить несколько голосовых каналов в частотном спектре для передачи
через радиорелейную станцию СВЧ диапазона, коаксиальный или оптоволоконный кабель.
В случае цифровой связи аналоговая звуковая информация сначала преобразуется в цифровую с
использованием АЦП. Цифровая информация, представляющая индивидуальные звуковые каналы,
мультиплексируется во времени (многоканальный доступ с временным разделением, TDMA) и передается по
последовательной цифровой линии связи (как в ИКМ-системе).
Еще одна причина обработки сигналов заключается в сжатии полосы частот сигнала (без
существенной потери информации) с последующим форматированием и передачей информации на
пониженных скоростях, что позволяет сузить требуемую полосу пропускания канала. В
высокоскоростных модемах и системах адаптивной импульсно-кодовой модуляции (ADPCM) широко
используются алгоритмы устранения избыточности данных (сжатия), так же как и в цифровых системах
мобильной связи, системах записи звука MPEG, в телевидении высокой четкости (HDTV).
Промышленные системы сбора данных и системы управления используют информацию, полученную от
датчиков, для выработки соответствующих сигналов обратной связи, которые, в свою очередь,
непосредственно управляют процессом
Обратите внимание, что эти системы требуют наличия как АЦП и
ЦАП, так и датчиков, устройств нормализации сигнала (signal conditioners) и DSP (или микроконтроллеров)
В некоторых случаях в сигнале, содержащем информацию, присутствует шум, и основной целью
является восстановление сигнала. Такие методы, как фильтрация, автокорреляция, свертка и т.д.,
часто используются для выполнения этой задачи и в аналоговой, и в цифровой областях.
ЦЕЛИ ОБРАБОТКИ СИГНАЛОВ
Извлечение информации о сигнале (амплитуда, фаза, частота, спектральные составляющие ,временные
соотношения)
Преобразование формата сигнала (телефония с разделением каналов FDMA, TDMA, CDMA)
Сжатие данных (модемы, сотовые телефоны, телевидение HDTV, сжатие MPEG)
Формирование сигналов обратной связи (управление промышленными процессами )
Выделение сигнала из шума (фильтрация, автокорреляция, свертка)
Выделение и сохранение сигнала в цифровом виде для последующей обработки (БПФ)
Представители
См. также: Список советских компьютерных систем
Польский электронный аналоговый компьютер «AKAT-1»
Среди аналоговых вычислительных устройств можно выделить:
- FERMIAC
- ZAM
«Итератор»
«Итера́тор» — специализированная АВМ, предназначенная для решения линейных краевых задач систем линейных дифференциальных уравнений. Разработана в Институте кибернетики АН УССР в 1962 году.
«Итератор» решает краевую задачу итерационным способом Ньютона, сводящим её к решению нескольких дифференциальных уравнений с заданными начальными условиями. Этот алгоритм заключается в определении матрицы первых производных по компонентам вектора начальных условий и автоматического поиска решения краевой задачи с использованием этой матрицы. Благодаря примененному методу, сходимость итерационного процесса с заданной допустимой ошибкой решения обеспечивается за три-четыре итерации.
Кроме систем дифференциальных уравнений с постоянными и переменными коэффициентами 2n-го порядка с линейными краевыми условиями, «Итератор» решает системы линейных алгебраических уравнений n-го порядка с произвольной матрицей коэффициентов.
Характеристики
- максимальный порядок решаемой системы дифференциальных уравнений — 8;
- максимальное число точек в интервале интегрирования, входящих в краевые условия — 3;
- максимальная погрешность — до 3 %;
- число операционных усилителей — 21;
- потребляемая мощность — 1кВ·A.
«МН»
Семейство аналоговых вычислительных машин. Название является аббревиатурой слов «модель нелинейная». Были предназначены для решения задач Коши для обыкновенных дифференциальных уравнений. Наиболее совершенным представителем машин этого ряда была машина «МН-18» — АВМ средней мощности, предназначенная для решения методами математического моделирования сложных динамических систем, описываемых дифференциальными уравнениями до десятого порядка в составе аналого-цифрового вычислительного комплекса или самостоятельно. Схема управления позволяет производить одновременно и разделенный запуск интеграторов по группам, однократное решение задач и решение задач с повторением. Допустимо объединение до четырёх машин МН-18 в единый комплекс.
Основные технические характеристики
- количество операционных усилителей — 50;
- максимальный порядок решаемых уравнений — 10;
- диапазон изменения применяемых величин ± 50 В;
- время интегрирования — 1000 с;
- потребляемая мощность — 0,5 кВ × А.
История
Подробнее по этой теме см. История вычислительной техники.
Антикитерский механизм, ок. 100 год до н. э.
Астролябия (1208 год, Персия)
Логарифмическая линейка
Примечание: для сравнения указаны отдельные этапы развития цифровых вычислительных устройств.
Одним из самых древних аналоговых приборов считается антикитерский механизм — механическое устройство, обнаруженное в 1902 году на затонувшем древнем судне недалеко от греческого острова Антикитера. Датируется приблизительно 100 годом до н. э. (возможно, до 150 года до н. э.). Хранится в Национальном археологическом музее в Афинах.
Астрологи и астрономы пользовались аналоговым прибором астролябия с IV века до нашей эры вплоть до XIX века нашей эры. Этот прибор использовался для определения положения звезд на небе и вычисления продолжительности дня и ночи. Современным потомком астролябии является планисфера — подвижная карта звёздного неба, используемая в учебных целях.
- 1622 год, английский математик-любитель Уильям Отред разработал первый вариант логарифмической линейки, устройство, которое можно считать первым аналоговым вычислительным прибором.
- 1642 год — Блез Паскаль изобрёл «паскалину».
- 1674 год — создана машина Морленда
- 1814 год — учёный Дж. Герман (Англия) создал планиметр — аналоговое устройство, которое предназначено для нахождения площади, ограниченной замкнутой кривой на плоскости.
- 1878 год — польский математик Абданк-Абаканович разработал теорию интерграфа — некоего аналогового интегратора — устройства, позволяющего получить интеграл от произвольной функции, изображённой на плоском графике.
- 1904 год — российский инженер Алексей Крылов изобрел первую механическую вычислительную машину, решающую дифференциальные уравнения (применялась при проектировании кораблей).[источник не указан 1799 дней]
- 1912 год — создана машина для интегрирования обыкновенных дифференциальных уравнений по проекту российского учёного Алексея Крылова.[источник не указан 1799 дней]
- 1930 год — Ванневар Буш (США) создал механическую интегрирующую машину, применяющийся при расчёте траектории стрельбы корабельных орудий. (в 1942 году — создана её электромеханическая версия).
- 1935 год — выпуск первой советской электродинамической счётно-аналитической машины САМ (модель Т-1). Разработаны механический интегратор и электрический расчётный стол для определения стационарных режимов энергетических систем.[источник не указан 3321 день]
- 1938 год — немецкий инженер Конрад Цузе вскоре после окончания в 1935 году Берлинского политехнического института построил свою первую машину, названную Z1. Это была полностью механическая программируемая цифровая машина.
- 1942—1944 годы, США — операционный усилитель постоянного тока, имеющий достаточно высокий коэффициент усиления, что дало возможность конструировать аналоговые компьютеры без движущихся частей, на постоянном токе.
- 1945—1946 годы, СССР — под руководством Льва Гутенмахера изобретены первые электронные аналоговые машины с повторением решения.
- 1949 год, СССР — изобретён ряд АВМ на постоянном токе, что положило начало развитию аналоговой вычислительной техники в СССР.
- 1958 год — Фрэнк Розенблатт разработал первый нейрокомпьютер-перцептрон Марк-1, который не является полностью аналоговым, а скорее относится к гибридным системам.
- 1960-е годы, аналоговые компьютеры являлись повседневным инструментом ученых для решения множества специфических задач в различных областях науки. В СССР расцвет электронных аналоговых вычислительных машин с их серийным выпуском пришёлся на 1960—1970-е годы.
Подключение аналоговых входов
Но всё же немного об этом рассказать надо.
К аналоговым входам обычно подключают устройства двух типов:
- Активные датчики — датчики со стандартным аналоговым выходом (см. выше).
- Пассивные датчики.
С активными датчиками проще. Если выбранный вами микроконтроллер это позволяет, то выход такого датчика можно напрямую (или через простой резистивный делитель) подключить к аналоговому входу микроконтроллера.
С пассивными датчиками сложнее, потому что они пассивные )))
То есть на выходе таких датчиков не какого-либо активного сигнала (ни тока, ни напряжения, ни частоты).
Например, термопреобразователи сопротивления — довольно широко распространённые в автоматизации датчики температуры, изменяют своё сопротивление, как вы понимаете, в зависимости от температуры.
Однако микроконтроллер не умеет измерять сопротивление. И чтобы его этому научить, надо каким-то образом пассивный сигнал сделать активным. Один из простейших способов (но не самый лучший) показан на рисунке ниже:
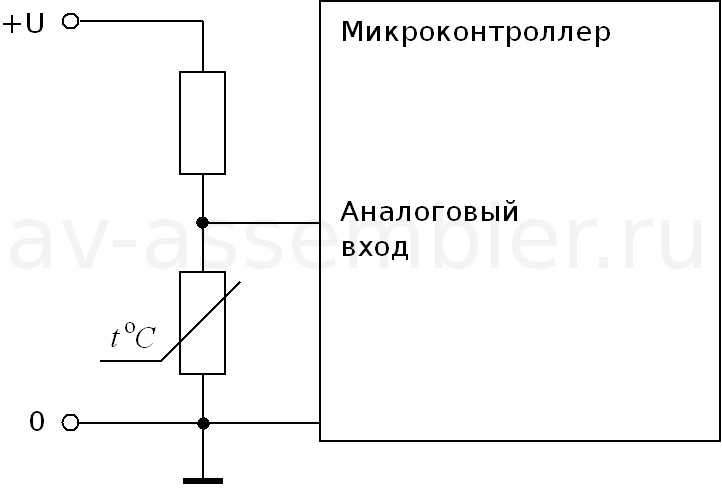
Здесь мы видим простой резистивный делитель, одним звеном которого (на рисунке — нижним) является термосопротивление. Так как его сопротивление будет изменяться вместе с температурой, то и напряжение на аналоговом входе микроконтроллера тоже будет меняться. Эти изменения мы и можем зафиксировать и преобразовать уже программно в значение температуры (зная зависимость термосопротивления от температуры, и рассчитав напряжение на аналоговом входе).
Повторюсь — это не лучший способ. И не со всеми микроконтроллерами и не со всеми термосопротивлениями такой трюк можно проделать. Но зато это простой способ.
Для тех, кто ещё не понял, объясняю: таким нехитрым способом, как показано на рисунке, мы превратили пассивный датчик в активный. То есть преобразовали сопротивление в напряжение.
Ну а как преобразовать это напряжение в температуру — это уже отдельная история…
Методы и технологии обработки сигналов
Сигналы могут быть обработаны с использованием аналоговых методов (аналоговой обработки
сигналов, или ASP), цифровых методов (цифровой обработки сигналов, или DSP) или комбинации аналоговых
и цифровых методов (комбинированной обработки сигналов, или MSP). В некоторых случаях выбор методов
ясен, в других случаях нет ясности в выборе и принятие окончательного решения основывается на
определенных соображениях.
Что касается DSP, то главное отличие его от традиционного компьютерного анализа данных
заключается в высокой скорости и эффективности выполнения сложных функций цифровой обработки,
таких как фильтрация, анализ с использованием быстрого
преобразования Фурье (БПФ) и сжатие данных в реальном масштабе времени.
Термин «комбинированная обработка сигналов» подразумевает, что системой выполняется и
аналоговая, и цифровая обработка. Такая система может быть реализована в виде печатной платы,
гибридной интегральной схемы (ИС) или отдельного кристалла с интегрированными элементами. АЦП и
ЦАП рассматриваются как устройства комбинированной обработки сигналов, так как в каждом из них
реализованы и аналоговые, и цифровые функции.
Недавние успехи технологии создания микросхем с очень высокой степенью интеграции (VLSI)
позволяют осуществлять комплексную (цифровую и аналоговую) обработку на одном кристалле. Сама
природа ЦОС подразумевает, что эти функции могут быть выполнены в режиме реального масштаба
времени.
Пример реализации
В качестве примера использования DSP сравним аналоговый и цифровой фильтры низкой частоты (ФНЧ),
каждый с частотой среза 1 кГц.
Цифровой фильтр реализован в виде типовой цифровой системы, показанной на рисунок 2
Обратите
внимание, что в диаграмме принято несколько неявных допущений. Во -первых, чтобы точно обработать
сигнал, принимается, что тракт АЦП /ЦАП обладает достаточными значениями частоты дискретизации,
разрешающей способности и динамического диапазона
Во -вторых, для того, чтобы закончить все свои
вычисления в пределах интервала дискретизации (1/fs), устройство ЦОС должно иметь достаточное
быстродействие. В -третьих, на входе АЦП и выходе ЦАП сохраняется потребность в аналоговых
фильтрах ограничения и восстановления спектра сигнала (anti-aliasing filter и anti-imaging filter), хотя требования
к их производительности невелики. Приняв эти допущения, можно сравнить цифровой и аналоговый
фильтры.
Требуемая частота среза обоих фильтров — 1 кГц. Аналоговое преобразование реализуется
первого рода шестого порядка
(характеризуется наличием пульсаций коэффициента передачив полосе пропускания и отсутствием пульсаций вне полосы
пропускания). Его характеристики представлены на рисунке 2. На практике этот фильтр может быть представлен тремя
фильтрами второго порядка, каждый из которых построен на операционном усилителе и нескольких
резисторах и конденсаторах. С помощью современных систем автоматизированного
проектирования (САПР) фильтров создать фильтр шестого порядка достаточно просто, но чтобы удовлетворить техническим
требованиям по неравномерности характеристики 0,5 дБ, требуется точный подбор компонентов.
Представленный же на рисунке 2 цифровой КИХ-фильтр со 129 коэффициентами имеет неравномерность
характеристики всего 0,002 дБ в полосе пропускания, линейную фазовую характеристику и намного более
крутой спад. На практике такие характеристики невозможно реализовать с использованием
аналоговых методов. Другое очевидное преимущество схемы состоит в том, что цифровой фильтр не
требует подбора компонентов и не подвержен дрейфу параметров, так как частота синхронизации
фильтра стабилизирована кварцевым резонатором. Фильтр со 129 коэффициентами требует 129 операций
умножения с накоплением (MAC) для вычисления выходного отсчёта. Эти вычисления должны быть
закончены в пределах интервала дискретизации 1/fs, чтобы обеспечить работу в реальном масштабе
времени. В этом примере частота дискретизации равна 10 кГц, поэтому для обработки достаточно 100 мкс,
если не требуется производить существенных дополнительных вычислений. Семейство DSP ADSP-21xx может
закончить весь процесс умножения с накоплением (и другие функции, необходимые для реализации
фильтра) за один командный цикл. Поэтому фильтр со 129 коэффициентами требует быстродействия более
129/100 мкс = 1,3 миллиона операций с секунду (MIPS). Существующие DSP имеют намного большее быстродействие
и, таким образом, не являются ограничивающим фактором для этих приложений. Быстродействие серии 16-разрядных
ADSP-218x с фиксированной точкой достигает 75MIPS. В листинге 1 приведен ассемблерный код, реализующий
фильтр на DSP процессорах семейства ADSP-21xx
Обратите внимание, что фактические строки исполняемого
кода помечены стрелками; остальное — это комментарии
Аналого-цифровой преобразователь
Схема АЦП изображена на рисунке 5.

Рисунок 5 – АЦП.
Аналого-цифровой преобразователь состоит из блоков дискретизации (Zero-OrderHold1), квантователя (Quantizer1), целочисленного преобразователя (RoundingFunction1) и конвертора (IntegertoBitConverter1).
Так как АЦП составляет в том числе и блок IntegertoBitConverter1, то на АЦП должны подаваться положительные значения. Поэтому между генератором сигнала и АЦП необходимо разместить блок Fcn3 со значением expression равным u+10.
Рисунок 6 – Блок смещения сигнала в положительный диапазон.
Блоков дискретизации Zero-OrderHold1 выполняет экстраполяцию входного сигнала на интервале дискретизации. Блок фиксирует значение входного сигнала в начале интервала дискретизации и поддерживает на выходе это значение до окончания интервала дискретизации. Затем входной сигнал изменяется скачком до величины входного сигнала на следующем шаге дискретизации. Параметр блока simpletime настраивает такт дискретизации.
Рассчитаем такт дискретизации.
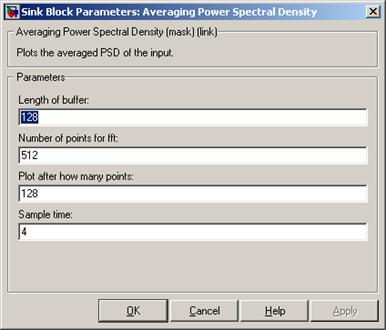
Рисунок 7 – Настройка блока Averaging Power Spectral Density.
В результате получим график, приведенный на рисунке 8:
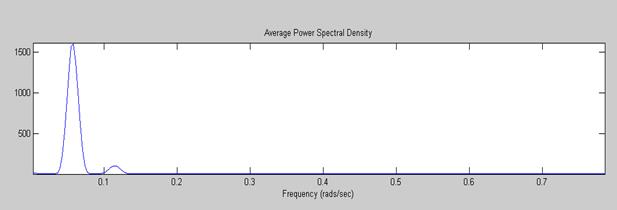
Рисунок 8 – Спектр сигнала.
На графике отчетливо видно две гармоники при ω=0,06 рад/с и при ω=0,11 рад/с. Расчет периода дискретизации ведется по второй гармонике.
Таким образом, блок дискретизации Zero-OrderHold1 будет иметь следующие настройки:
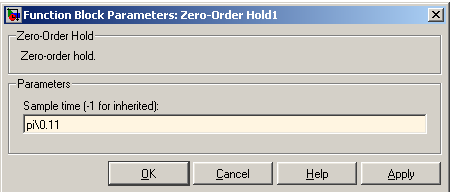
Рисунок 9 – Настройки блока Zero-OrderHold1.
Следующим элементом в АЦП является квантователь. Он обеспечивает квантование с одинаковым шагом по уровню. Рассчитаем значения его параметров.
Таким образом, настройки блока квантования Quantizer1 будут следующие:
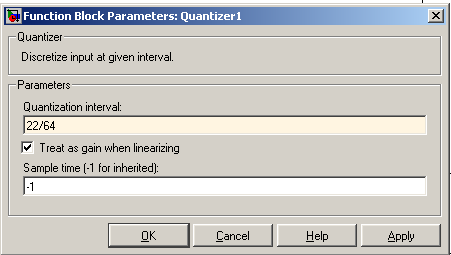
Рисунок 10 – Настройки блока Quantizer1.
Блок RoundingFunction1 является простой математической функцией округления значения до ближайшего целого. Этот блок – подготовительное звено перед конвертированием квантованного сигнала в биты.
Блок IntegertoBitConverter1 выполняет преобразование целочисленных значений в биты. Настройки этого блока приведены на рисунке 11:
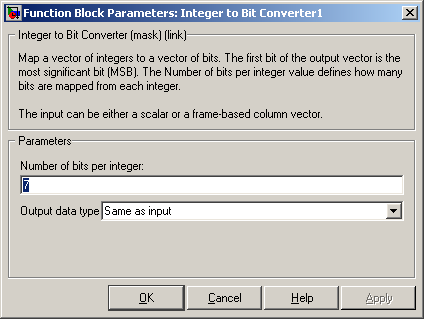
Рисунок 11 – Настройки блока Integer to Bit Converter1.
Параметр numberofbitsperinteger (количество бит на число) определяется разрядностью АЦП (6) плюс 1.
Блоки Gain выполняют умножение входного сигнала на постоянный коэффициент.
Параметры:
Gain – Коэффициент усиления.
Multiplication – Способ выполнения операции. Может принимать значения (из списка):
— Element-wise K*u– Поэлементный.
— Matrix K*u – Матричный. Коэффициент усиления является левосторонним операндом.
— Matrix u*K – Матричный. Коэффициент усиления является правосторонним операндом.
Saturate on integer overflow (флажок) – Подавлять переполнение целого. При установленном флажке ограничение сигналов целого типа выполняется корректно.
Параметр блока Gain может быть положительным или отрицательным числом, как больше, так и меньше 1. Коэффициент усиления можно задавать в виде скаляра, матрицы или вектора, а также в виде вычисляемого выражения.
Сигнал
Сигнал (от лат. «signum» – знак) – физический процесс или явление, несущий сообщение о каком-либо событии, состоянии объекта либо передающий команды управления. Таким образом, изменение характеристики носителя, которое используется для представления информации, называется сигналом, а значение этой характеристики, отнесенное к некоторой шкале измерений, – параметром сигнала. Например, процессы для передачи информации – волны (звуковые, радио-, световые, электрический ток), параметры сигнала – частота, амплитуда и фаза волны (высота, громкость и фаза звука). Различают аналоговые, дискретные, квантованные и цифровые сигналы, которые в свою очередь могут быть синхронными и асинхронными.
Аналоговый сигнал
Это сигнал, величина которого непрерывно изменяется во времени. Он обеспечивает передачу данных путем непрерывного изменения во времени амплитуды, частоты либо фазы. Аналоговые сигналы описываются непрерывными функциями времени, поэтому аналоговый сигнал иногда называют непрерывным (рис. 1.3).
К особенным свойствам непрерывного сигнала относят отсутствие избыточности. Из непрерывности пространства значений следует, что любая помеха, внесенная в сигнал, неотличима от самого сигнала и, следовательно, исходная амплитуда не может быть восстановлена, хотя в принципе возможна фильтрация помехи, если известна дополнительная информация о самом сигнале. Аналоговые сигналы используются для представления каких-либо непрерывно изменяющихся физических величин. Например, аналоговый электрический сигнал, снимаемый с термопары, несет информацию об изменении температуры; сигнал с микрофона – о быстрых изменениях
Рис. 1.3. Непрерывный гармонический сигнал
давления в звуковой волне. Аналоговые сигналы описываются некоторой математической функцией времени. Например, для гармонического сигнала справедливо следующее соотношение:
Дискретный сигнал. Процесс перевода аналогового сигнала в дискретный (рис. 1.4) называется дискретизацией, а процесс обратный этому – восстановлением. Непрерывный аналоговый сигнал заменяется здесь последовательностью коротких импульсов-отсчетов, величина которых равна значению сигнала в данный момент времени. Дискретизация аналогового сигнала состоит в том, что сигнал представляется в виде последовательности значений, взятых в дискретные моменты времени. Эти значения называются отсчетами, а – интервалом дискретизации.
Возможность точного воспроизведения такого представления зависит от интервала времени между отсчетами . Согласно теореме Котельникова
где – наибольшая частота спектра сигнала.
Квантованный сигнал
При квантовании вся область значений сигнала разбивается на уровни, количество которых должно быть представлено в числах заданной разрядности (рис. 1.5). Расстояния между этими уровнями называется шагом квантования ∆. Число этих уровней равно N (от 0 до N-1). Каждому уровню
Рис. 1.4. Дискретный сигнал
Рис. 1.5. Квантованный сигнал
присваивается некоторое число. Отсчеты сигнала сравниваются с уровнями квантования, и в качестве сигнала выбирается число, соответствующее некоторому уровню квантования. Каждый уровень квантования кодируется двоичным числом с п разрядами. Число уровней квантования N и число разрядов п двоичных чисел, кодирующих эти уровни, связаны соотношением п ≥ log2(1V).
Цифровой сигнал
Для того чтобы представить аналоговый сигнал последовательностью чисел конечной разрядности, его следует сначала превратить в дискретный сигнал, а затем подвергнуть квантованию. В результате сигнал будет представлен таким образом, что на каждом заданном промежутке времени известно приближенное (квантованное) значение сигнала, которое можно записать целым числом. Если записать эти целые числа в двоичной системе, получится последовательность нулей и единиц, которая и будет являться цифровым сигналом (рис. 1.6).
Рис. 1.6. Цифровой сигнал
Выделяют синхронные и асинхронные цифровые сигналы. Синхронным является сигнал, значения которого могут изменяться только в моменты, определяемые тактами. Например, ежедневный выстрел из пушки в полдень. Асинхронным выступает сигнал, изменение значения которого может происходить в любое время.
Типы аналоговых входов
Пожалуй, говорить о типах аналоговых входов неинтересно. Потому что нас больше интересуют типы аналоговых сигналов.
Наиболее распространены два вида аналоговых сигналов:
- Токовые сигналы
- Сигналы напряжения
По диапазону значений на выходе датчика они также отличаются. Основные диапазоны следующие:
- Токовые:
- 0…5 мА
- 0…20 мА
- 4…20 мА
- Напряжения:
- 0…0,01 В
- 0…1 В
- 0…10 В
Поэтому практически все устройства, рассчитанные на подключение аналоговых датчиков, поддерживают один или несколько из перечисленных выше типов аналоговых сигналов.
Если вы будете создавать свои устройства на микроконтроллерах, то я также советую вам придерживаться этих стандартов. Хотя, конечно, никто не может запретить вам использовать нестандартные диапазоны и типы аналоговых сигналов.
Также надо учитывать, что все аналоговые входы микроконтроллера имеют и другие характеристики, такие как входное сопротивление. Но так глубоко в электронику в этой статье мы не полезем — всё таки она рассчитана на начинающих.
Объединение с Сигнал радиотехника
Категорически против. Такие ссылки на понятие аналоговости, как во время суток, станут совершенно непонятными. Да и вообще с чего г-н Участник:Unomano взял что аналоговый это непременно радио или вообще ЭЛЕКТРИЧЕСКИЙ?! А как же механические аналоговые интеграторы? (пример: счётчик километража в старых автомобилях)
Я считаю предложение г-на Unomano совершенно некомпетентным и вредным. Incnis Mrsi 20:56, 10 декабря 2006 (UTC)
- Против, конечно.—Dstary 09:03, 14 декабря 2006 (UTC)
- Естественно, против. И удалю шаблон. —Кae 10:05, 21 декабря 2006 (UTC)
- Согласен. Аналоговый любой сигнал, например, оптическое изображение на фотоматериале фотопленке я считаю аналоговм, когда сигнал зафиксирован в любой момент времени текущего оригинального сигнала и при воспроизведении дает копию оригинала. Если пишут об аналоговом характере сигнала, то почему нет сравнения с оригиналом. Любая аналогия — это не оригинал, как бы вы к нему не стремились. Moisey 05:48, 6 апреля 2008 (UTC) Moisey 14:54, 4 апреля 2008 (UTC) Moisey 15:39, 4 апреля 2008 (UTC)
Применение
Индикатор кулачкового аналогового компьютера
Аналоговые электронные компьютеры основываются на задании физических характеристик их составляющих. Обычно это делается методом включения-исключения некоторых элементов из цепей, которые соединяют эти элементы проводами, и изменением параметров переменных сопротивлений, ёмкостей и индуктивностей в цепях.
Автомобильная автоматическая трансмиссия является примером гидромеханического аналогового компьютера, в котором при изменении вращающего момента жидкость в гидроприводе меняет давление, что позволяет получить необходимый конечный коэффициент передачи.
До появления мощной и надёжной цифровой аппаратуры аналоговые вычислители широко применялись в авиационной и ракетной технике, для оперативной обработки различной информации и последующего формирования сигналов управления в автопилотах и различных более сложных системах автоматического управления полётом, или другими специализированными процессами.
Помимо технических применений (автоматические трансмиссии, музыкальные синтезаторы), аналоговые компьютеры используются для решения специфических вычислительных задач практического характера. Например, кулачковый механический аналоговый компьютер, изображённый на фото, применялся в паровозостроении для аппроксимации кривых 4 порядка с помощью преобразований Фурье.
Механические компьютеры использовались в первых космических полётах и выводили информацию с помощью смещения индикатора поверхностей. С первого пилотируемого космического полета до 2002 года, каждый пилотируемый советский и российский космический корабль из серий Восток, Восход и Союз был оснащен компьютером «Глобус»[источник не указан 1670 дней], показывающим движение Земли через смещение миниатюрной копии земного шара и данные о широте и долготе.
Военная техника
В военной технике исторически выработалось ещё одно название аналоговых вычислительных устройств для управления огнём артиллерии, высотного бомбометания и других военных задач, требующих сложных вычислений — это счётно-решающий прибор. Примером может служить прибор управления зенитным огнём.
Аналоговая техника интересна для военных двумя чертами: она крайне быстра, и в условиях помех работоспособность машины восстановится, как только помеха пропадёт.
Современная техника
Сейчас аналоговые компьютеры уступили своё место цифровым технологиям, системам автоматики и обработки сигналов на основе некоторых микросхем FPGA для «смешанных» цифровых и аналоговых сигналов.