Механические и электрические характеристики асинхронных электродвигателей
Содержание:
- Немного терминов
- Устройство и схема подключения АД
- Шаблоны асинхронности
- Состав трехфазного асинхронного электродвигателя разных типов. С короткозамкнутым ротором.
- Реактивные синхронные двигатели
- Конструкция статора
- Как подключить двигатель к источнику питания
- Почему он вращается
- Почему он асинхронный
- Человек в синхронном мире
- Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы n fM или s fM.
- I’2 = 3U1ф2 r’2 / щs [(r1 + r’2/s) + (x1 + x’2)2] (1)
- Принцип действия асинхронного двигателя
- Конструкция асинхронного электродвигателя
- Вращающееся магнитное поле.
- Однофазный асинхронный двигатель
- Асинхронный ход
Немного терминов
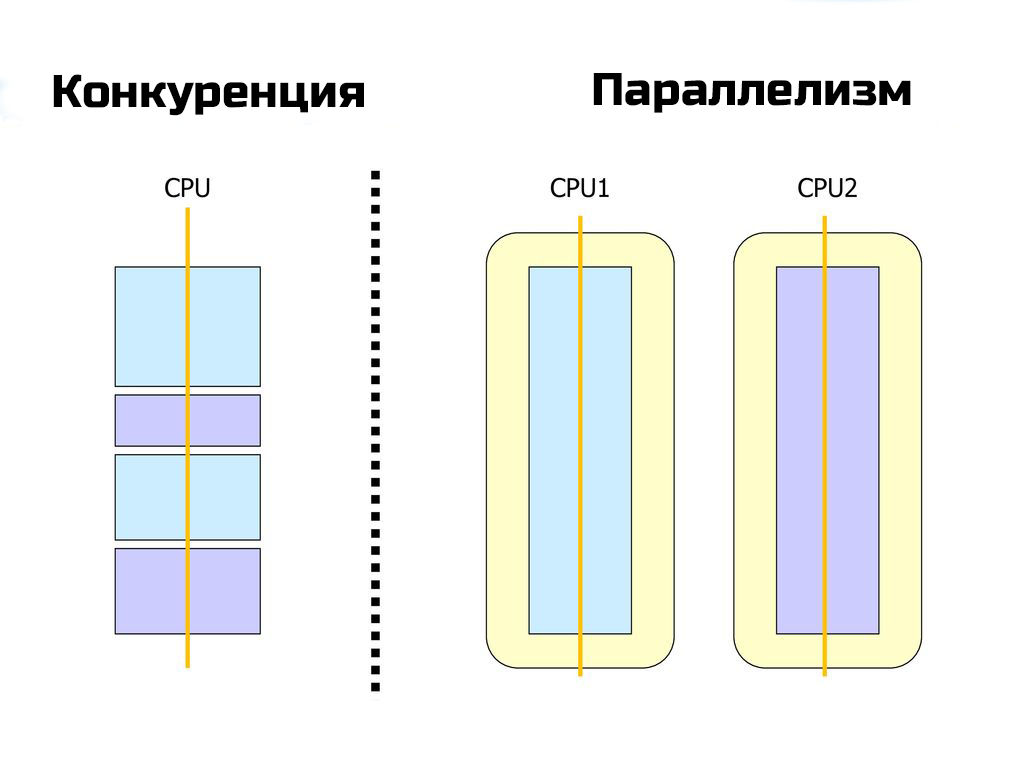
Когда речь заходит об асинхронности, всплывают еще три близких понятия. Это конкурентность (concurrency), параллелизм (parallel execution) и многопоточность (multithreading). Все они связаны с одновременным выполнением задач, однако это не одно и то же.
Конкурентность
Понятие конкурентного исполнения самое общее. Оно буквально означает, что множество задач решаются в одно время. Можно сказать, что в программе есть несколько логических потоков – по одному на каждую задачу.
При этом потоки могут физически выполняться одновременно, но это не обязательно.
Задачи при этом не связаны друг с другом. Следовательно, не имеет значения, какая из них завершится раньше, а какая позже.
Параллелизм
Параллельное исполнение обычно используется для разделения одной задачи на части для ускорения вычислений.
Например, нужно сделать цветное изображение черно-белым. Обработка верхней половины не отличается от обработки нижней. Следовательно, можно разделить эту задачу на две части и раздать их разным потокам, чтобы ускорить выполнение в два раза.
Наличие двух физических потоков здесь принципиально важно, так как на компьютере с одним вычислительным устройством (процессорным ядром) такой прием провести невозможно
Многопоточность
Здесь поток является абстракцией, под которой может скрываться и отдельное ядро процессора, и тред ОС. Некоторые языки даже имеют собственные объекты потоков. Таким образом, эта концепция может иметь принципиально разную реализацию.
Асинхронность
Идея асинхронного выполнения заключается в том, что начало и конец одной операции происходят в разное время в разных частях кода. Чтобы получить результат, необходимо подождать, причем время ожидания непредсказуемо.
Устройство и схема подключения АД
У статора две электрообмотки. Одна из них рабочая, которая является основной. Вторая пусковая и нужна, чтобы осуществлять пуск устройства. Отличие однофазовых моторов — отсутствие момента впуска. Ротор напоминает беличью клетку по структуре.Ток одной фазы производит магнитное поле. Оно состоит из двух полей. Включая устройство, ротор двигателя неподвижен.
Расчет результирующего момента при неподвижном роторе лежит в основе магнитных полей образующих два вращающихся момента.
Противоположные моменты обозначаются М.
n – частота вращения
Расчет:
Mn = M1 — M2
Если неподвижную часть задействовать, тогда наступит вращающий момент. Из-за его недоступности при запуске, двигатели оборудованы дополнительным пусковым устройством.
Отличие однофазных асинхронных двигателей от трёхфазных — особенности статора. Пазы имеютдвухфазовую обмотку. Одна будет основной или рабочей, а вторая именуется пусковой.
Магнитные оси находятся по отношению друг к другу на 90 градусов. Включенная рабочая фаза не вызывает вращение ротора по причине неподвижной оси магнитного поля.
Существуют специальные программы для расчета обмоток статора.
Шаблоны асинхронности
Можно выделить три самые популярные схемы асинхронных запросов. Рассмотрим их реализацию с помощью «обещаний» (JavaScript) и операторов async-await (C#).
Для демонстрации потребуются тестовые функции, которые имитируют возвращение нужных объектов с задержкой.
JavaScript:
function getPromise(returnValue) {
return new Promise((resolve) => {
setTimeout(() => {
resolve(returnValue);
}, 300);
});
}
C#:
public static async Task GetStringTask(String toReturn)
{
await Task.Delay(300);
return toReturn;
}
public static async Task GetIntTask(int toReturn)
{
await Task.Delay(300);
return toReturn;
}
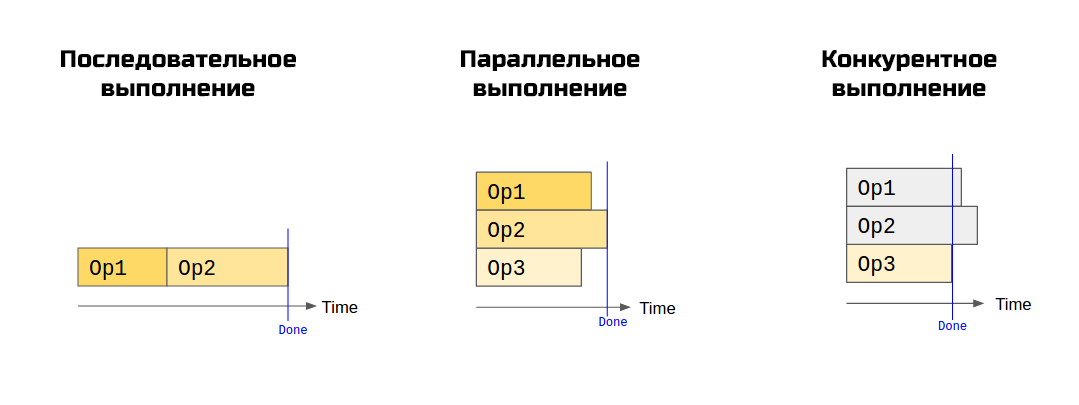
Последовательное выполнение
Используется для связанных задач, которые нужно запускать друг за другом. Например, первый запрос получает названия фильмов, а второй – информацию о них.
JavaScript:
getPromise('value1')
.then((result) => {
return getPromise(result + 'value2');
}).then((result) => {
return getPromise(result + 'value3');
}).then((result) => {
console.log(result); // => value1value2value3
});
Каждая функция возвращает новый , выполнение которого также можно отслеживать. В результате получается удобная одноуровневая цепочка обещаний.
C#:
var str = await GetStringTask("Hello world");
var len = await GetIntTask(str.Length);
var res = await GetStringTask("Len: " + len);
Console.Out.WriteLine(res);
Переменная получит значение только тогда, когда отработает функция . Лишь после этого обработчик кода продолжит выполнение.
Параллельное выполнение
Применяется для решения независимых задач, когда важно, чтобы выполнились все запросы. Например, данные веб-страницы грузятся с трех серверов, а после этого начинается рендеринг
Концепция в JavaScript:
Promise.all().then((results) => {
...
})
Параметр – это массив, в котором содержатся результаты всех трех выполненных операций.
C#:
var tasks = new Task; tasks = GetIntTask(1); tasks = GetIntTask(2); tasks = GetIntTask(3); Task.WaitAll(tasks); for (int i = 0; i
Метод класса собирает результаты трех запросов вместе.
Конкурентное выполнение
Используется для решения независимых задач, когда важно, чтобы выполнился хотя бы один запрос. Например, отправка идентичных запросов на разные сервера
JavaScript:
Promise.race().then((result) => {
...
})
В параметр попадет первый вернувшийся результат из трех.
C#:
var tasks = new Task;
tasks = GetIntTask(1);
tasks = GetIntTask(2);
tasks = GetIntTask(3);
int firstResult = Task.WaitAny(tasks);
Console.Out.WriteLine("Res " + firstResult);
Метод дождется самого первого выполнения и положит его в переменную .
Это лишь простые примеры использования асинхронных инструментов в разных языках. Чтобы писать эффективный и понятный код, необходимо познакомиться с ними поближе. Например, почитать про обещания можно здесь и здесь.
Состав трехфазного асинхронного электродвигателя разных типов. С короткозамкнутым ротором.
Основные
типы двигателей. По
конструкции асинхронные двигатели
подразделяют на два основных типа: с
короткозамкнутым ротором и фазным
ротором (последние называют также
двигателями с контактными кольцами).
Рассматриваемые двигатели имеют
одинаковую конструкцию статора и
отличаются лишь выполнением обмотки
ротора.
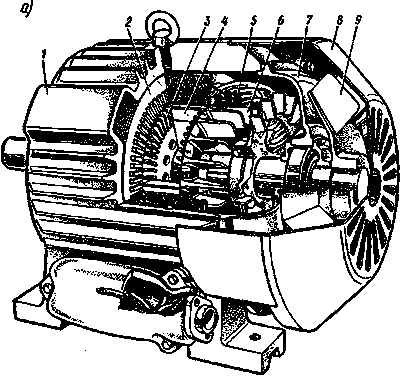
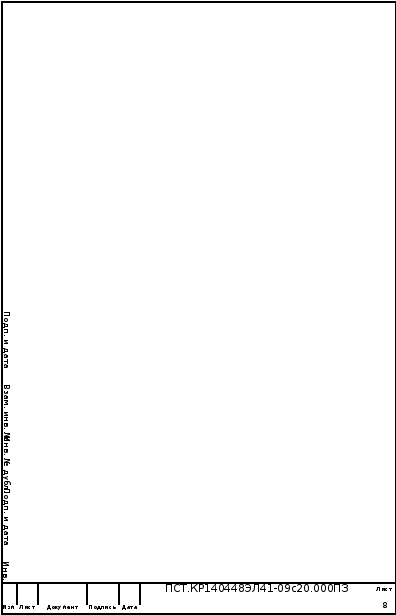
Двигатели
с короткозамкнутым ротором (рис.
4.3, а и б). На
статоре расположена трехфазная обмотка
(см. § 3.6), которая при подключении к сети
трехфазного тока создает вращающееся
магнитное поле. Обмотка ротора выполнена
в виде беличьей клетки, является
короткозамкнутой и никаких выводов не
имеет (рис. 4.3, в).
Беличья
клетка состоит из медных или алюминиевых
стержней, замкнутых накоротко с торцов
двумя кольцами (рис. 4.4, а).
Стержни этой обмотки вставляют в пазы
сердечника ротора без какой-либо
изоляции. В двигателях малой и средней
мощности беличью клетку обычно получают
путем заливки расплавленного алюминиевого
сплава в пазы сердечника ротора (рис.
4.4,6).
Вместе со стержнями беличьей клетки
отливают короткозамыкающие кольца и
торцовые лопасти, осуществляющие
вентиляцию машины.
|
|
|
Рис.
1 |
Для
этой цели особенно пригоден алюминий,
так как он обладает малой плотностью,
легкоплавкостью и достаточно высокой
электропроводностью. В машинах большой
мощности пазы короткозамкнутого ротора
выполняют полузакрытыми, в машинах
малой мощности — закрытыми. Обе формы
паза позволяют хорошо укрепить проводники
обмотки ротора, хотя и несколько
увеличивают потоки рассеяния и индуктивное
сопротивление роторной обмотки. В
двигателях большой мощности беличью
клетку выполняют из медных стержней,
концы которых вваривают в короткозамыкающие
кольца (рис. 4.4, в). Различные формы пазов
ротора показаны на рис. 4.4, г.
В
электрическом отношении беличья клетка
представляет собой многофазную обмотку,
соединенную по схеме Υ и замкнутую
накоротко. Число фаз обмотки m2 равно
числу пазов ротора z2,
причем в каждую «фазу» входят один
стержень и прилегающие к нему участки
короткозамыкающих колец.
Часто
асинхронные двигатели с фазным и
короткозамкнутым ротором имеют скошенные
пазы на статоре или роторе. Скос пазов
делают для того, чтобы уменьшить высшие
гармонические ЭДС, вызванные пульсациями
магнитного потока из-за наличия зубцов,
снизить шум, вызываемый магнитными
причинами, и устранить явление прилипания
ротора к статору, которое иногда
наблюдается в микродвигателях.
|
|
Рис. |
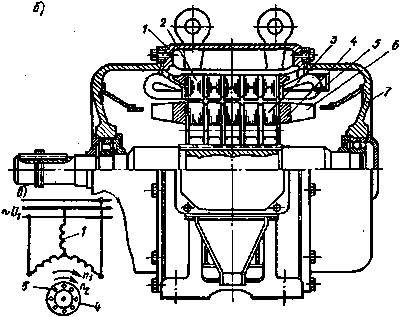
Двигатели
с фазным ротором(рис.
4.5, а).
Обмотка статора выполнена так же, как
и в двигателях с короткозамкнутым
ротором. Ротор имеет трехфазную обмотку
с тем же числом полюсов. Обмотку ротора
обычно соединяют по схеме Υ, три конца
которой выводят к трем контактным
кольцам (рис. 4.5,6),
вращающимся вместе с валом машины. С
помощью металлографитных щеток,
скользящих по контактным кольцам, в
ротор включают пусковой или пускорегулирующий
реостат, т. е. в каждую фазу ротора вводят
добавочное активное сопротивление.
Чтобы
уменьшить износ колец и щеток, двигатели
с фазным ротором иногда имеют приспособления
для подъема щеток и замыкания колец
накоротко после выключения реостата.
Однако введение этих приспособлений
усложняет конструкцию электродвигателя
и несколько снижает надежность его
работы, поэтому обычно применяют
конструкции, в которых щетки постоянно
соприкасаются с контактными кольцами.
Основные конструктивные элементы
двигателя с фазным ротором приведены
на рис. 4.6.
Реактивные синхронные двигатели
Синхронные реактивные электродвигатели всегда работают только в паре с преобразователем частоты и используют тот же тип управления потоком статора, что и обычный АД. Роторы данных машин изготавливают из тонколистной электротехнической стали с пробитыми пазами таким образом, что бы они намагничивались с одной стороны меньше, чем с другой. Стремление магнитного поля ротора «соединится» с вращающимся магнитным потоком статора и создает вращающий момент.
Основным плюсом реактивных синхронных электродвигателей являются незначительные потери в роторе. Таким образом, хорошо спроектированная и работающая с правильно подобранным алгоритмом управления синхронная реактивная машина вполне способна соответствовать европейским стандартам премиум класса IE4 и NEMA, не используя при этом постоянных магнитов. Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Основным недостатком является низкий коэффициент мощности по сравнению с асинхронной машиной, что приводит к большей потребляемой мощности из сети. Это увеличивает затраты и ставит перед инженером сложную задачу, стоит ли применять реактивную машину или нет для конкретной системы?
Сложность в изготовлении ротора и его хрупкость делает невозможным применение реактивных электродвигателей для высокоскоростных операций.
Синхронные реактивные машины хорошо подходят для широкого спектра промышленных применений, которые не требуют больших перегрузок или высоких скоростей вращения, а также все чаще применяются для частотно-регулируемых насосов из-за повышенной их эффективности.
Конструкция статора
 Она двухслойная. Наружную «рубашку», которая обеспечивает механическую прочность конструкции, ранее отливали из чугуна. Сейчас все чаще используют легкие сплавы. Для эффективного отвода тепла на ней делают ребра жесткости. Внутри находится слой, набранный из листов легированной стали, которые изолированы друг от друга диэлектрическим лаком. На его внутренней поверхности устроены пазы. В них укладываются обмотки – медный проводник из нескольких витков, которые изолированы друг от друга во избежание пробоя, приводящего к снижению силы магнитного поля и аварии машины. Зазор между статором и ротором очень мал, поэтому витки скрыты в толще металла, чтобы не мешать вращению.
Она двухслойная. Наружную «рубашку», которая обеспечивает механическую прочность конструкции, ранее отливали из чугуна. Сейчас все чаще используют легкие сплавы. Для эффективного отвода тепла на ней делают ребра жесткости. Внутри находится слой, набранный из листов легированной стали, которые изолированы друг от друга диэлектрическим лаком. На его внутренней поверхности устроены пазы. В них укладываются обмотки – медный проводник из нескольких витков, которые изолированы друг от друга во избежание пробоя, приводящего к снижению силы магнитного поля и аварии машины. Зазор между статором и ротором очень мал, поэтому витки скрыты в толще металла, чтобы не мешать вращению.
Как подключить двигатель к источнику питания
Чтобы осуществить пуск асинхронного двигателя, его необходимо подключить к сети трёхфазного тока. Схема асинхронного двигателя собирается двумя способами. На рисунке показана схема соединения выводов двигателя, в которой статорные обмотки собраны способом «звезда».
На этом рисунке изображён другой способ соединения, именуемый «треугольник». Собираются схемы в клеммной коробке, закреплённой на корпусе.
Следует знать, что начала каждой из трёх катушек, их ещё называют обмотками фаз, именуются С1, С2, С3 соответственно. Аналогично подписываются концы, которые имеют названия С4, С5, С6. Если в клеммной коробке нет маркировки выводов, то начала и концы придётся определить самостоятельно.
Почему он вращается
Принцип работы электродвигателя переменного тока основан на феномене возникновения вращающегося магнитного поля, в двух или трех соленоидах, определенным образом ориентированных в пространстве.
Направление вектора электромагнитного поля определяется правилом левой руки, согласно которому четыре пальца указывают направление движения тока, а пятый (большой) – движения самого проводника под действием сил электромагнитной индукции, входящих в открытую ладонь.
Если соленоид один, то при пропускании через него переменного тока стальной сердечник совершает колебательные движения. Чтобы он смог совершить оборот на 360°, нужны минимум две катушки, расположенные перпендикулярно друг другу, из-за чего суммарный вектор силы электромагнитной индукции будет описывать окружность.
Лучший, более стабильный, результат получается при использовании трех соленоидов, расположенных под углом друг к другу в 120°. Сдвиг фазы тока в катушках соленоида может быть достигнут не только позиционированием, но и включением в цепь одного из них активной нагрузки. Например, конденсатора.
Почему он асинхронный
Магнитное поле статора наводит в сердечнике ротора электрический ток, в результате чего он обзаводится собственным. Его полюса стремятся притянуться к тем, которые его породили, но это движение никогда не завершится по двум причинам:
- При совпадении полюсов пропадает разница электрических потенциалов между деталями машины, из-за чего ток в роторе прекращает течь, магнитное поле исчезает, а вал затормаживается. Эта своеобразная пульсация частоты вращения более выражена в двигателях, работающих от одной или двух фаз. Поэтому три катушки предпочтительнее.
- Статор больше ротора на величину магнитного зазора, поэтому создаваемое им магнитное поле имеет большую угловую скорость относительно центра вала.
Человек в синхронном мире
Один занятой молодой человек запланировал на вечер свидание. Он очень хочет, чтобы все прошло идеально, а для этого нужно сделать несколько дел:
- разобраться с рабочими документами;
- забрать костюм из химчистки;
- съездить в цветочный магазин за букетом лилий;
- а самое главное – попросить маму приготовить ее фирменный торт.
Без торта, букета, костюма и стопки разобранных бумаг, свидание точно не состоится.
Молодой человек живет в синхронном мире. Это значит, что он не может приступить к следующему делу, пока не закончится предыдущее.
Прежде всего, нужно отправить запрос на торт, так как приготовление занимает несколько часов. Он звонит маме, и она тут же начинает замешивать тесто. К вечеру торт несомненно будет готов. Однако молодой человек не успеет сделать остальные дела, и свидание не состоится. Дело в том, что все это время он провел с трубкой у уха, ожидая подтверждения о завершении запроса. Бессердечный синхронный мир не позволил ему поработать и купить букет.
Решить проблему могло бы асинхронное программирование. С его помощью блокирующий процесс маминой готовки можно убрать из потока приготовления к свиданию.
В асинхронном мире человек не зависит от торта. Он просит маму перезвонить, а сам едет за парадным костюмом в химчистку. Когда выложена последняя вишенка, мама запускает событие «Торт готов». Нарядный молодой человек хватает букет и бежит на свидание.
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы n fM или s fM.
Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма.
Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы Мэм = (3I22r2)/щs и схемы замещения.
С помощью схемы замещения определяют приведенный ток фазы ротора:
I’2 = U1ф /v(r1 + r’2/s) + (x1 + x’2)2
где
r’2/s = r’2 + r’2(1- s)/s
Полученное значение тока I’2 подставляют в уравнение момента, в котором предварительно I2 и r2 заменяют через их приведенные значения:
М = (3I22r2)/щs = (3I’22r’2)/щs
I’2 = 3U1ф2 r’2 / щs [(r1 + r’2/s) + (x1 + x’2)2] (1)
Принцип действия асинхронного двигателя
Рассмотрим устройство, показанное на рис. Оно состоит из постоянного магнита 1, медного диска 2, рукоятки 3 и подшипников 4. Если вращать магнит при помощи рукоятки, то медный диск начинает вращаться в ту же сторону, но с меньшей частотой. Медный диск можно рассматривать как бесчисленное множество замкнутых витков; при вращении магнита 1 его магнитные силовые линии (м.с.л.) пересекают витки диска, и в витках наводится электродвижущая
Модель асинхронного двигателя
Обозначим:
п, — частота вращения магнита (синхронная частота), об/мин;
п2 — частота вращения диска, об/мин; п — разность частот вращения магнита и диска, об/мин.
Частота вращения диска меньше частоты вращения магнита, и, следовательно, диск вращается с несинхронной (асинхронной) частотой. Разница частот магнита и диска представляет собой частоту, с которой м.с.л. пересекают витки диска. Отношение разницы частот к синхронной частоте называется скольжением. Скольжение может быть выражено в долях единицы или в процентах:
В двигателях вращающееся магнитное поле создается трехфазным током, протекающим по обмотке статора, а роль диска выполняет обмотка ротора. Активная сталь статора и ротора служит магнитопроводом, уменьшающим в сотни раз сопротивление магнитному потоку.
Под влиянием подведенного к статору напряжения сети Ul в его обмотке протекает ток I,. Этот ток создает вращающийся магнитный поток Ф, замыкающийся через статор и ротор. Поток создает в обеих обмотках э.д.с. Е{ и Е2, как в первичной и вторичной обмотках трансформатора. Таким образом, асинхронный двигатель подобен трехфазному трансформатору, в котором э.д.с. создаются вращающимся магнитным потоком.
Рис. 2 . Работа асинхронного двигателя при cos ф2 = 1
Пусть поток вращается в направлении движения стрелки часов. Под влиянием э.д.с. Е2 в обмотке ротора пойдет ток I2, направление которого показано на рис. 2. Предположим, что он совпадает по фазе с Е2. Взаимодействие тока I2 и потока Ф создает электромагнитные силы F, приводящие ротор во вращение, вслед за вращающимся потоком. Таким образов, асинхронный двигатель представляет собой трансформатор с вращающейся вторичной обмоткой и способный поэтому превращать электрическую мощность E2I2 cos ф в механическую.
Ротор всегда отстает от вращающегося магнитного потока, так как только в этом случае может возникать э.д.с. Е2, а следовательно, ток 12 и силы F. Чтобы изменить направление вращения ротора, следует изменить направление вращения потока. Для этого меняют местами два любых провода, подводящие ток от сети к статору. В этом случае меняется порядок следования фаз ABC на АСВ или ВАС, и поток вращается в обратную сторону.
Ротор двигателя вращается с асинхронной частотой п2, поэтому и двигатель называется асинхронным. Частоту вращения магнитного потока называют синхронной частотой п1. Частота вращенияротора
Теоретически скольжение меняется от 1 до 0 или от 100% до 0, так как при неподвижном роторе в первый момент пуска п2 — 0; а если вообразить, что ротор вращается синхронно с потоком, п2 = пх.
Чем больше нагрузка на валу, тем меньше скорость ротора п2 и следовательно больше S, так как больший тормозной момент должен уравновеситься вращающим моментом; последнее возможно только при увеличении Е2 и I2, а значит и S. Скольжение при номинальной нагрузке SH у асинхронных двигателей равно от 1 до 7%; меньшая цифра относится к мощным двигателям.
Конструкция асинхронного электродвигателя
Оптимальным конструкторским решением расположения соленоидов является их размещение на внутренней поверхности цилиндра (трубы), внутри которого находится металлический вращающийся сердечник. Первый, поскольку он неподвижный, назвали статором электрической машины, а второй – ротором.
Постоянство расстояния между этими частями, называемого магнитным зазором, обеспечивается двумя крышками с подшипниками качения в центре. У асинхронных двигателей он не превышает трех миллиметров, поскольку при больших значениях сила электромагнитного взаимодействия между ротором и статором ослабевает настолько, что вал останавливается.
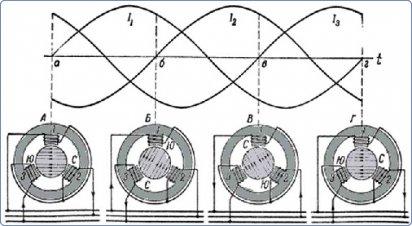
Вращающееся магнитное поле.
Для
получения простейшего трехполюсного
вращающегося поля необходимо три
одинаковые фазные обмотки расположить
на статоре так, чтобы углы между их осями
были равны 120. Если фазные обмотки
соединить по схеме звезда или треугольник
и подключить к трехфазному источнику
электрической энергии, то в витках
катушек появятся токи:
iA
=
Im
sin
wt
;
iB
=
Im
sin(wt
–120) ;
iA
=
Im
sin(wt
– 240) .
Токи
фазных обмоток создают магнитные поля.
Результирующее магнитное поле вращается
в плоскости осей катушек по часовой
стрелки с угловой скоростью w.
Оно совпадает по направлению с осью той
из фаз обмоток, ток в которой достигает
максимального значения.
Рассмотрим
3 момента времени: 1, 2, 3 (см. рис. 4.21).
i
iA
iB
iC
1
2 3
wt
Рис.
4.21
Направления
токов в обмотках статора в соответствии
с укладкой будут выглядеть так, как
представлено на рис. 4.22:
Рис. 4.22
Полярность
в обмотках показана на рис. 4.2:
Для
моментов времени соответственно
полярность
представлена на рис. 4.23 а), б), в).
–
– –
+ +
+
(а)
+
+ –
+ –
–
(б)
+
– +
– +
–
(в)
Рис.
4.23
Чтобы
изменить направление вращения магнитного
поля достаточно изменить порядок
подключения двух любых фазных обмоток
асинхронной машины к трехфазному
источнику электрической энергии.
РЕЖИМ
РАБОТЫ ТРЕХФАЗНОЙ АСИНХРОННОЙ МАШИНЫ.
Режим
работы трехфазной асинхронной машины
определяется режимом электромагнитного
взаимодействия токов в обмотке статора
с токами ротора. Взаимодействие
вращающегося магнитного поля, создаваемого
токами в обмотках статора с токами
ротора вынуждает ротор вращаться по
направлению вращения поля. Но чем быстрее
вращается ротор, тем меньше индуктируемая
в его обмотке эдс, а значит и токи. Если
частота вращения поля –
f1,
а частота вращения ротора – f,
то режим работы асинхронного двигателя
можно характеризовать скольжением.
f
режим
двигателя режим
режим эл.–магн.
генерато- тормоза
ра
1
S
Рис.
4.24
В
зависимости от значения скольжения
трехфазная асинхронная машина может
работать в режиме двигателя, генератора
и электромагнитного тормоза.
В
режиме двигателя
(0
В
режиме генератора
(S
В
режиме электромагнитного
тормоза
(S>1)
трехфазная
асинхронная машина вращается в
направлении, противоположном направлению
вращения магнитного поля, создаваемого
токами в обмотках статора. В режиме
электромагнитного тормоза в трехфазной
асинхронной машине рассеивается
значительная энергия на гистерезис и
вихревые токи.
Для
устойчивой работы двигателя важно,
чтобы автоматически устанавливалось
равновесие вращающего и тормозного
моментов; с увеличением нагрузки на
валу двигателя должен соответственно
возрасти и вращающий момент. Это
уравновешивание у работающего асинхронного
двигателя осуществляется следующим
образом: при увеличении нагрузки на
валу тормозной момент оказывается
больше вращающего момента, следовательно,
частота ротора уменьшается, скольжение
растет, что в свою очередь, влечет за
собой увеличение вращающего момента,
и равновесие моментов восстанавливается
при возросшем скольжении S
Зависимость
вращающего момента от S
сложна. Не вдаваясь в подробности,
изобразим график этой зависимости (см.
рис. 4.25):
M неустойчивый
режим
(1)
Mпом
Mmax
(2) Mпуск
S
Sкр
1
Рис.4.25
На
рис. 4.25 участок (1) является режимом
перегрузки, а участок (2) — рабочим режимом.
Максимальный
момент определяет перегрузочную
способность асинхронного двигателя.
У
работающего двигателя динамическое
равновесие моментов автоматически
восстанавливается при увеличении
скольжения, пока тормозной момент на
валу меньше максимального вращающего
момента двигателя. У нормальных
асинхронных двигателей максимальный
момент больше номинального в 2 – 2,5 раз.
При перегрузке свыше максимального
момента двигатель входит в область
неустойчивого режима (если тормозной
момент на валу постоянен) и останавливается.
Это обстоятельство вынуждает выбирать
мощность двигателя так, чтобы даже при
кратковременной перегрузке не был
превышен максимальный момент, в противном
случае привод должен быть снабжен
соответствующим маховиком.
Зависимость
M(S)
часто представляется в виде f(M).
Эта зависимость называется механической
характеристикой.
По своей форме она отличается от M(S)
только положением по отношению к
координатным осям.
f
Mmax
Mпуск
M
Рис. 4.26
Однофазный асинхронный двигатель
Фактически, любой асинхронный электродвигатель является трехфазным и предусматривает подключение к трехфазной сети с напряжением 380 В. Однофазным или двухфазным его называют при подключении к однофазной электросети с напряжением 200 В, когда питание подается лишь на две обмотки. В такой схеме на основную рабочую обмотку подается чистая фаза от сети, а на другую питание идет через фазосдвигающий элемент, как правило, конденсатор. Такая схема позволяет создать необходимую индукцию для смещения ротора и запустить асинхронный двигатель от однофазной сети. Для дальнейшей его работы даже необязательно, чтобы пусковая обмотка (которую подключают через конденсатор) оставалась под напряжением.
Дело в том, что трехфазный асинхронный двигатель продолжает функционировать (под малой нагрузкой) даже если во время работы от него отключить подачу энергии по одному из питающих проводов, сымитировав таким образом работу от однофазной сети. Это обусловлено тем, что результирующее магнитное поле сохраняет вращение.
Асинхронный ход
Асинхронный ход характеризуется возникновением разных частот в несинхронно работающих частях энергосистемы, хотя электрическая связь по линиям электропередачи между ними не нарушается. Мощность по линиям электропередачи, связывающим несинхронно работающие энергосистемы согласно рис. 47.7, каждый полупериод меняет свой знак и в целом за период равна нулю, если не учитывать потери и асинхронной мощности, возникающей при асинхронном ходе. Поэтому в энергосистемах, их частях, которые до возникновения асинхронного хода получали мощность по линиям связи, при асинхронном ходе возникает дефицит мощности с понижением частоты, а в частях, энергосистемах, работающих с избытком мощности до аварии, частота повышается.
Асинхронный ход между отдельными частями энергосистемы, ОЭС может прекратиться при выравнивании частот в этих частях. Поэтому выравнивание частот при появлении асинхронного хода является первоочередной задачей оперативного персонала, для чего он должен использовать весь резерв мощности, а при необходимости и отключение потребителей.
Асинхронный ход, как правило, недопустим в тех случаях, когда при его появлении потери в роторе оказываются больше номинальных, а ток етатора — больше 1 1 / ном.
Однако асинхронный ход, не являющийся для системы нормальным режимом, не должен осуществляться без проверки.
Если асинхронный ход обусловлен нарушением статической устойчивости возбужденного синхронного генератора, то его выпадение происходит медленно и возможно вторичное нарушение устойчивости в этом процессе.
На длительный асинхронный ход двигатели не рассчитаны. Поэтому на их устанавливается специальная защита от несинхронной работы. На менее ответственных двигателях она действует на отключение. Используется также минимальная защита — напряжения, в основном для обеспечения бесперебойной работы уста-ковки в целом ( имеющей и асинхронные двигатели) и действия в случае длительного исчезновения напряжения. Защиту в сочетании с органами направления активной мощности используют также для отделения от шин питающей подстанции ( см. гл. НОм; выдержки времени выбираются с учетом соображений, данных выше для аналогичных защит асинхронных двигателей.
На длительный асинхронный ход двигатели не рассчитаны. Поэтому на них устанавливается специальная защита от несинхронной работы. На менее ответственных двигателях она действует на отключение. На ответственных двигателях защита может действовать на устройство ресинхронизации ( которое снимает возбуждение и обратно его подает при достижении подсинхронной скорости), автоматическую разгрузку или отключение с последующим автоматическим пуском. Используется также минимальная защита напряжения, в основном для обеспечения бесперебойной работы установки в целом ( имеющей и асинхронные двигатели) и действия в случае длительного исчезновения напряжения. Защиту в сочетании с органами направления активной мощности используют также для отделения от шин питающей подстанции ( см. гл. Напряжение срабатывания для нее желательно иметь примерно 0 5t / HOM; выдержки времени выбираются с учетом соображений, данных выше для аналогичных защит асинхронных двигателей.
Возникновение асинхронного хода по одной линии электропередачи может привести к нарушению устойчивости и по другим линиям электропередачи. В этом случае асинхронный ход должен прекращаться специальной автоматикой.
Возникновение асинхронного хода и количество его циклов.
|
Изменение активной ( а и реактивной ( б асинхронной мощности и напряжения ( в при постоянном среднем скольжении. |
При асинхронном ходе и скорости больше синхронной генератор, работая как асинхронный, выдает активную мощность, называемую асинхронной.
При асинхронном ходе частота электрического тока ( и частота вращения агрегатов) в различных точках системы различна: в районах с избытком мощности частота выше, а с дефицитом мощности — ниже.
При асинхронном ходе двух разделившихся частей энергосистемы ЛПВОС разрешается, когда разность частот сравнительно невелика.
При асинхронном ходе под действием положительной полярности напряжения скольжения протекает пульсирующий ток в обмотке ротора. При отрицательной полярности напряжения скольжения вентили полупроводникового прео-бразователя оказываются под напряжением обратной полярности, в результате обмотка ротора оказывается практически разомкнутой.
При асинхронном ходе наряду с знакопеременным синхронным моментом появляется асинхронный момент, зависящий от величины скольжения и конструкции выпавшей из синхронизма машины.