Шаговые двигатели
Содержание:
Принцип работы
 Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Шаговый двигатель работает по простым принципам. Первый этап — приложение напряжения к клеммам. Благодаря этому щетки на самом устройстве начинают постоянно двигаться. Двигатель холостого хода имеет свойство преобразовывать входящие импульсы.
Эти импульсы имеют прямоугольную направленность и преображение идет в заранее определенное положение ведущего вала, который к нему приложен. Вследствие этого вал перемещается под определенным углом. Оснащенные подобным редуктором приспособления довольно эффективны и надежны при условии наличия нескольких электромагнитов. Находиться они должны вокруг центральной детали из железа, имеющей зубчатую форму.
Внешняя цепь, отвечающая за управление, подает сигнал к магниту. При возникновении необходимости повернуть вал в ту или иную сторону тот электромагнит, на который был послан импульс, начинает быстро притягивать к себе зубья колеса. Они постепенно выравниваются с этим элементом, но смещаются по отношению к другим магнитным частям приспособления.
После выключения первого электромагнита включается второй и начинается беспрерывное движение шестеренки. Благодаря этому деталь выравнивается с предыдущим колесом. Такой цикл повторяется необходимое количество раз. Каждый из них и называется постоянным шагом. Именно поэтому двигатель получил такое название. Вычислить скорость его работы можно с помощью подсчета шагов, которые необходимы для обеспечения полного цикла.
Классификация по конструкции статора
Простейший статор в шаговом движке содержит две обмотки. Чтобы изменить движение ротора на противоположное, потребуется изменить полярность напряжения на ее выводах (это вариант «а» на изображении далее). Такой движок называют биполярным ШД.
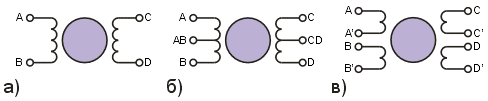
Варианты конструкции обмоток ШД
Если обмотка состоит из двух соединенных частей, каждая из которых определяет одно направление перемещения ротора, ШД именуется униполярным. При этом рекомендуется не забывать указывать то, что речь именно о шаговом двигателе. Это связано с тем, что существует отдельная группа униполярных двигателей, которые конструктивно отличны от всех других. Соединение обмоток можно разорвать, и тогда в движке получатся четыре отдельные обмотки. Но такой ШД также является униполярным (изображения «б» и «в»).
Устройство шагового электродвигателя
Шаговый двигатель, работающий от постоянного тока, умеет делить один полный оборот на большое количество шагов. Устройство состоит из следующих деталей:
- Контроллер специального назначения для шагового привода.
- Клеммы.
- Обмотки.
- Блок управления или приборная модель.
- Магнитная часть.
- Сигнализаторы.
- Передатчики.
Принцип работы шагового электродвигателя
Принцип работы электродвигателя состоит в следующем. На клеммы прибора подается напряжение, после чего щетки двигателя приводятся в постоянное движение. Двигатель на холостом ходу начинает преобразование входящих импульсов прямоугольного направления в положение приложенного вала, имеющего определенную направленность, и перемещает его под некоторым углом.
Максимальная эффективность такого электродвигателя достигается наличием нескольких зубчатых магнитов, сосредоточенных вокруг железного колеса зубчатой формы. Когда к определенному электромагниту прилагается энергия, он начинает притягивать зубья колеса. После их выравнивания по отношению к этому электромагниту, они становятся смещены относительно следующей магнитной части электродвигателя.
Первый магнит отключается, включается второй электромагнит, происходит вращение шестеренки, которая выравнивается с предыдущим колесом. Это циклическое действие происходит необходимое количество раз. Одно выполненное вращение называют шагом электродвигателя.
Преимущества и недостатки
К основным преимуществам шаговых электродвигателей относят их точность. То есть, при попадании напряжения на обмотку, прибор поворачивается на строго определенную величину угла. Еще одним несомненным достоинством можно назвать стоимость агрегата. Ведь если сравнивать их цену с, например, сервоприводами, то они стоят в 2 раза дешевле.
Основной недостаток шагового электропривода — возможное проскальзывание ротора. Причин может быть несколько:
- Слишком высокая нагрузка на валу.
- Неправильные настройки программы управления.
- Скорость вращения приближается к резонансным показателям.
Решение этих проблем возможно, если использовать датчики поворота. Но автоматически эта проблема решается не всегда. В некоторых случаях задача выполнима только после остановки производственной программы. Проблема проскальзывания электродвигателя решается также путем увеличения его мощности.
Область применения шагового электродвигателя
Область применения шагового электродвигателя достаточно обширна. Например, гибридные шаговые электродвигатели активно используют при создании станков с числовым программным управлением, которые работают по дереву, выполняют плазменную резку металлов или фрезерные операции. Шаговые приборы отлично подходят для управления чертежной головкой в копировальных станках с цифровым программным управлением.
Передача факсов на расстояние при помощи телефонной связи также не обходится без использования таких приборов. В космических летательных аппаратах для изучения космоса шаговые двигатели использовались, например, в ЛА Mariner как устройство для наведения телевизионных камер и спектрометров на нужные цели.
Практика
Цель упражнения запустить биполярный шаговый двигатель, вместо чего можно использовать по приведенному выше методу и униполярный двигатель. На плате модуля «Двигателя» имеются два драйвера L293D, которые управляются четырьмя входными выводами микроконтроллера. Каждый вывод обозначает один конец полярности обмотки. Напряжение конца обмотки положительное, если вывод высокий, и отрицательное, если вывод низкий. Концам 1A, 1B, 2A и 2B соответствуют выводы микроконтроллера PB0, PB1, PB2 и PB3.
Для управления биполярным шаговым двигателем в библиотеке Домашней Лаборатории есть функция bipolar_init, которая настраивает выводы выходом и функция bipolar_halfstep, которая совершает вращение на определенное количество полушагов. Коммутация происходит по таблице полушагов, но используются более сложные битовые операции.
//
// Подготовка управления биполярного шагового двигателя
//
void bipolar_init(void)
{
DDRB |= 0x0F;
PORTB &= 0xF0;
}
//
// Передвижение биполярного шагового двигателя полушагами
//
void bipolar_halfstep(signed char dir,
unsigned short num_steps, unsigned char speed)
{
unsigned short i;
unsigned char pattern, state1 = , state2 = 1;
// Утверждение направления +- 1
dir = ((dir ) ? -1 +1);
// Осуществление полушагов
for (i = ; i num_steps; i++)
{
state1 += dir;
state2 += dir;
// Создание шаблона
pattern = (1 ((state1 % 8) >> 1)) |
(1 ((state2 % 8) >> 1));
// Обозначение выхода
PORTB = (PORTB & 0xF0) | (pattern & 0x0F);
// Создание паузы для ожидания выполнения шага
sw_delay_ms(speed);
}
// Остановка двигателя
PORTB &= 0xF0;
}
Использование функций демонстрирует пример программы, которая поворачивает двигатель попеременно в одну и другую сторону на 200 полушагов. Скорость вращения двигателя определяет длинна паузы, создаваемая между шагами. Если паузу настроить слишком маленькой, то двигатель не успевает осуществлять вращение в связи с инертностью ротора и вал не двигается.
//
// Тест-программа биполярного шагового двигателя
// модуля «Двигатели» Домашней Лаборатории
//
#include
//
// Основная программа
//
int main(void)
{
// Настройка двигателя
bipolar_init();
// Бесконечный цикл
while (true)
{
// Вращение в одну сторону 200 полушагов со скоростью 30 мс/шаг
bipolar_halfstep(+1, 200, 30);
// Вращение в другую сторону 200 полушагов со скоростью 30 мс/шаг
bipolar_halfstep(-1, 200, 30);
}
}
Теория
Шаговый двигатель
Шаговые двигатели широко применяются в приложениях, требующих точность. В отличие от двигателя постоянного тока у шагового двигателя отсутствуют щетки и коммутатор — для этого там несколько отдельных обмоток, которые коммутируются внешней электроникой (драйвером). Вращение ротора происходит за счет коммутации обмоток шаг за шагом, без обратной связи. Здесь проявляется и один недостаток шаговых двигателей — в случае механической перегрузки, когда ротор не двигается, шаги начинают путаться и движение становится неточным. По виду обмоток, шаговые двигатели разделяются на два типа: униполярные и биполярные шаговые двигатели. По строению их делят еще на три вида:
- С переменным магнитным сопротивлением (высокая точность, низкий крутящий момент, низкая цена)
- С постоянным магнитом (низкая точность, высокий крутящий момент, низкая цена)
- Гибридный (высокая точность, высокий крутящий момент, высокая цена)
У шаговых двигателей с переменным магнитным сопротивлением зубчатые обмотки и зубчатый ротор из железа. Максимальная сила тяги возникает при перекрытии зубьев обоих сторон. В шаговых двигателях с постоянным магнитом, как следует из названия, есть постоянный магнит, который ориентируется в зависимости от полярности обмотки. В гибридных используются обе технологии.
Независимо от модели шагового двигателя для создания одного полного оборота вала (360 градусов) требуется сотня коммутационных шагов. Для обеспечения стабильного и плавного движения используют подходящую управляющую электронику, которая управляет двигателем в соответствии с его параметрами (инертность ротора, крутящий момент, резонанс и т.д.). Вдобавок в управляющей электронике можно применять различные методы коммутации. Коммутацию последовательно по одной обмотке называют полным шагом, но если коммутируется поочередно одна и две обмотки, то это называется полушагом. Используют так же синусоидальные микрошаги, что дает особую точность и плавность управления.
Униполярный шаговый двигатель
Обмотки униполярного шагового двигателя
Униполярный шаговый двигатель имеет пять или шесть проводов. В соответствии со схемой привода запускается разом только одна четвертая обмоток. Линии Vcc обычно соединяются с положительным питающим напряжением двигателя. Концы обмоток 1a, 1b, 2a, и 2b соединяются при коммутации через транзисторы только с землей, в связи, с чем их управляющая электроника довольно простая.
Биполярный шаговый двигатель
Обмотки биполярного шагового двигателя
Биполярный шаговый двигатель отличается от униполярного шагового двигателя тем, что полярность обмоток изменяется во время коммутации. Разом активируется половина обмоток, что обеспечивает в сравнении с униполярными шаговыми двигателями большую эффективность. У биполярных шаговых двигателей четыре провода, которые все соединяются отдельно полумостом. При коммутации полумосты прикладывают к концам обмоток положительное или отрицательное напряжение. Униполярные шаговые двигатели можно запускать и с помощью биполярного драйвера: для этого нужно соединить только линии обмоток 1a, 1b, 2a и 2b (Vcc остается не соединенным).
Необходимые коммутации полного шага и полушага шаговых двигателей с обоими видами обмоток отображает следующая таблица. Так как в случае драйвера униполярного шагового двигателя происходит только отпирание транзисторов, то эти шаги представлены логическими числами 0 и 1. Управление биполярным шаговым двигателем может потребовать больше сигналов, и его шаги представлены выходной полярностью драйвера.
| Униполярный | Биполярный | |||||||
|---|---|---|---|---|---|---|---|---|
| Шаг | 1A | 2A | 1B | 2B | 1A | 2A | 1B | 2B |
| Полный шаг | ||||||||
| 1 | 1 | + | — | — | — | |||
| 2 | 1 | — | + | — | — | |||
| 3 | 1 | — | — | + | — | |||
| 4 | 1 | — | — | — | + | |||
| Полушаг | ||||||||
| 1 | 1 | + | — | — | — | |||
| 2 | 1 | 1 | + | + | — | — | ||
| 3 | 1 | — | + | — | — | |||
| 4 | 1 | 1 | — | + | + | — | ||
| 5 | 1 | — | — | + | — | |||
| 6 | 1 | 1 | — | — | + | + | ||
| 7 | 1 | — | — | — | + | |||
| 8 | 1 | 1 | + | — | — | + |
Основные режимы
Изделие функционирует в нескольких режимах, которые предварительно настраиваются в зависимости от потребностей человека. Наиболее распространенными считаются следующие:
- Волновой режим предполагает протекание электрического тока только через одну обмотку. Сегодня он используется редко, для того чтобы снизить нагрузку на двигатель и количество потребляемой электроэнергии.
- Полношаговый — используется гораздо чаще и считается стандартным режимом для этого типа двигателя. Напряжение на обмотке при такой работе одинаково и приспособлению требует максимальное напряжение для корректного функционирования.
- Полушаговый режим — один из оригинальных способов изменить работу приспособления и при этом не затрагивать блок управления. Заключается в одновременном запитывании всех пар обмоток, что приводит к повороту ротора на половину своего обычного шага. Используя этот метод, можно получить двигатель с двойной мощностью при минимальных затратах электроэнергии. Он будет меньше изнашиваться и прослужит дольше, чем тот, что постоянно работает в полношаговом режиме.
- Микрошаговый режим сегодня считается наиболее часто применяемым при использовании шагового двигателя. Принцип действия заключается в подаче на обмотку не импульса, а сигнала, напоминающего синусоиду по форме. Такой режим делает работу двигателя более плавной, а переход от одного шага к другому незаметным. Благодаря этому уменьшаются рывки и скачки приспособления, оно может функционировать как обычный двигатель постоянного тока.
Последний режим имеет преимущество, поскольку представляет собой скорее метод подпитки двигателя, а не управления обмотками. Именно поэтому может использоваться при волновом или полношаговом способе работы приспособления. Если рассмотреть схему функционирования прибора в микрошаговом режиме, может показаться, что шаги становятся больше. На самом деле это не так, но процесс все равно становится плавным и отсутствуют рывки.
https://youtube.com/watch?v=NACbQfdMD_Q
Варианты управляющих сигналов обмоток
В ШД применяется несколько вариантов подачи управляющих импульсов на обмотки. Первый вариант предусматривает подачу напряжения только на одну обмотку. В остальных управляющий сигнал отсутствует. Одна обмотка создает на полюсах сердечника статора меньший по величине магнитный поток в сравнении с питанием нескольких обмоток. Поэтому крутящий момент в этом режиме управления получается наименьшим (изображение «а» ниже, «one phase on»).
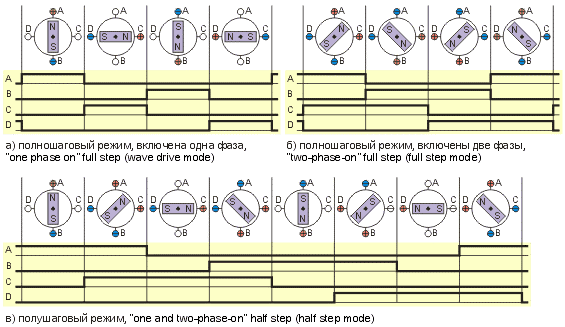
Режимы работы
Если управляющие импульсы подаются одновременно на две обмотки и это приводит к намагниченности соответствующих полюсов, крутящий момент увеличивается процентов на сорок. Величина шага в обоих вариантах получается одинаковой. Существующие при этом точки равновесия ротора во втором случае смещены на половину шага (изображение «б» выше, «two-phase-on»).
При комбинации первых двух рассмотренных вариантов достигается уменьшение шага наполовину. Таким способом можно получить небольшой шаг, не прибегая к замене двигателя более многополюсным и дорогим. По этой причине вариант управления «в» (на изображении выше «one and two-phase-on») используется наиболее широко. Его достоинствами также является большой крутящий момент, который при использовании эффективных коммутаторов близок к 100% значения, которое можно достичь.
Применением специальных управляющих схем получают минимальные перемещения ротора, и соответствующий режим работы ШД именуется как микрошаговый. Для этого применяются специальные схемы с микроконтроллерами и слежением за перемещением ротора. Пример схемы такого контроллера показан далее на изображении. Его управляющие выходы, как правило, маломощные. Поэтому их соединяют либо с базами биполярных, либо с затворами полевых транзисторов – ключей.
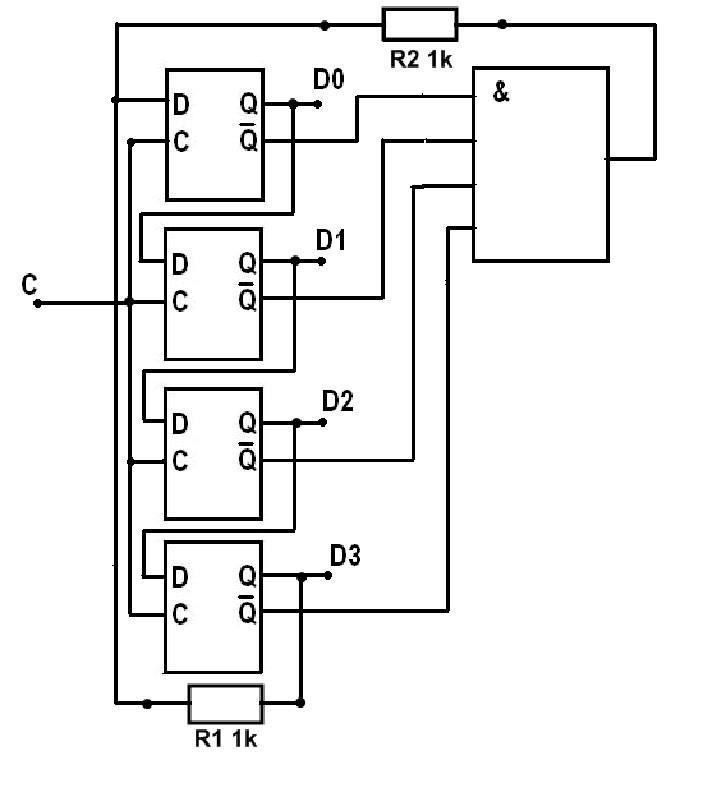
Пример контроллера для управления ШД
Вход, на который подаются импульсы управления, может быть соединен с ЭВМ. Это максимально расширяет функциональные возможности привода с таким ШД. Можно управлять даже несколькими ШД одной ЭВМ. Для этого при необходимости используется дополнительная микросхема, согласующая режим работы порта компьютера. Как, например, в схеме, показанной далее.

Схема
Кроме аппаратного обеспечения, для многофункционального управления ШД требуются специализированные программы. Но это уже отдельная обширная тема, которую нет смысла рассматривать в этой статье.
Управление ШД
23.01.2011 13:31
Александр
Существует несколько способов управления фазами шагового двигателя.
Первый способ обеспечивается попеременной коммутации фаз, при этом они не перекрываются, в один момент времени включена только одна фаза (рис а). Этот способ называют ”one phase on” full step или wave drive mode. Точки равновесия ротора для каждого шага совпадают с «естественными» точками равновесия ротора у незапитанного двигателя. Недостатком этого способа управления является то, что для биполярного двигателя в один и тот же момент времени иcпользуется 50% обмоток, а для униполярного – только 25%. Это означает, что в таком режиме не может быть получен полный момент.

Различные способы управления фазами шагового двигателя.
Общие сведения
 Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Существует две разновидности приспособления: униполярный шаговый двигатель и биполярный. Устройство представляет собой синхронный бесщеточный электродвигатель, имеющий одну или несколько обмоток. Ток, который подается на обмотки статора, вызывает фиксацию ротора, благодаря чему осуществляются его дискретные угловые перемещения или шаги.
Первые модели таких приспособлений появились еще в 30-е годы XIX века и представляли собой своеобразный магнит, приводящий в движение храповое колесо. Во время включения оно перемещалось на величину зубцового шага. Раньше механизм использовался на кораблях военного флота Великобритании с целью перемещения торпед в нужную сторону.
В настоящее время подобные механизмы востребованы и часто применяются. Шаговый мотор используется для обеспечения бесперебойного функционирования шлифовального и фрезерного станков, различных бытовых приборов, производственных механизмов и транспорта, а также жестких дисков персональных компьютеров. Именно поэтому он так востребован. Устройство состоит из нескольких частей:
- контролер, предназначенный для регулирования работы шагового привода;
- специальные магнитные части;
- обмотки;
- панель, выполняющая роль блока управления;
- сигнализаторы и передатчики, благодаря которым работа устройства отлаженная и бесперебойная.
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
#include Stepper.h> // библиотека для шагового двигателя
// количество шагов на 1 оборот, измените значение для вашего мотора
const int stepsPerRevolution = 200;
// устанавливаем порты для подключения драйвера
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
myStepper.setSpeed(60); // устанавливаем скорость 60 об/мин
}
void loop() {
// поворачиваем ротор по часовой стрелке
myStepper.step(stepsPerRevolution);
delay(500);
// поворачиваем ротор против часовой стрелки
myStepper.step(-stepsPerRevolution);
delay(500);
}
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
#include // библиотека для шагового двигателя
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
// Шаговый двигатель, управляемый платой// Шаговый двигатель, управляемый Н-мостом// Униполярный двигатель// Установка скорости оборотов в минуту// Установка скорости в шагах за секунду// Установка ускорения
// Возвращает текущее положение в шагахОбнуляет текущую позицию до нуля// Конечное положение в шагах// Вернуть расстояние до указанного положения// Переместиться в абсолютно указанное положение// Переместиться в относительно указанное положение
// Начать движение с ускорением, функцию следует вызывать повторно// Начать движение до указанной точки// Начать движение с ускорением до заданной позиции// Максимально быстрая остановка (без замедления)// Начать движение с заданной скоростью без плавного ускорения// Начать движение без плавного ускорения, до позиции
// Деактивирует зарезервированные пины и устанавивает их в режим LOW. Снимает напряжение с обмоток двигателя, экономя энергию// Активирует зарезервированные пины и устанавивает их в режим OUTPUT. Вызывается автоматически при запуске двигателя
4.2.Особенности конструкции и принципа работы линейного шагового двигателя
Линейные шаговые двигатели (ЛШД) преобразуют импульсную команду непосредственно в линейное перемещение. Это позволяет значительно упрощать кинематическую схему ряда электроприводов, устраняя механические преобразователи вращательного движения в поступательное.
Однокоординатный ЛШД можно представить как развернутый на плоскости ШД вращательного типа.
Рис.4.4
На рис.4.4 показана схема магнитной системы двухфазного однокоординатного ЛШД индукторного типа. Ротор ЛШД (подвижная часть), называемый иногда позиционером, выполнен в виде двух П-образных магнитопроводов 2 из электротехнической стали, которые подмагничиваются постоянным магнитом 3. На каждом из магнитопроводов ротора расположено по обмотке управления 1. Статор 4 представляет собой плиту из магнитомягкого материала; поверхность плиты, обращенная к ротору, зубчатая.
Поверхность полюсов ротора I—IV также зубчатая. Зубцовые деления τz ротора и статора равны. Зубцы двух полюсов в пределах одного магнитопровода ротора сдвинуты по отношению к зубцам статора на ½ зубцового деления, одного магнитопровода по отношению к другому — на ¼ зубцового деления. В результате зубцы всех полюсов ротора по-разному ориентированы относительно зубцов статора, но магнитное сопротивление потоку подмагничивания не зависит от перемещения якоря.
Принцип работы такого ЛШД не отличается от принципа работы индукторного ШД вращательного типа. В зависимости от наличия и знака импульса в обмотках управления максимум магнитного поля перемещается от полюса к полюсу ротора, например, по схеме I—III—II—IV. Синхронизирующая сила Fc перемещает ротор в такое положение, чтобы против зубцов данного полюса ротора находились зубцы статора, т.е. на ¼ зубцового деления.
В общем случае линейный механический шаг
. (4.5)
В многокоординатном ЛШД осуществлено механическое объединение электромагнитных систем, обеспечивающих перемещение по нескольким координатам. При этом рассмотренные выше однокоординатные ЛШД являются электромагнитными модулями, обеспечивающими перемещение по каждой из координат.
В линейных ЛШД применяют магнитно-воздушную подвеску. Ротор притягивается к статору силами магнитного притяжения полюсов ротора. Через специальные форсунки под ротор нагнетается сжатый воздух, между ротором и статором возникает воздушная подушка, и ротор подвешивается над статором с минимальным воздушным зазором. При этом обеспечивается близкое к нулю сопротивление движению ротора и высокая точность позиционирования.
На базе ШД и ЛШД могут быть созданы многокоординатные исполнительные механизмы, осуществляющие сложные перемещения в декартовой, цилиндрической и сферической системах координат.
Назад | Оглавление | Вперед