Коллекторный двигатель постоянного тока
Содержание:
- Управление
- Целесообразность применения машин постоянного тока и способы регулирования скорости вращения этих машин
- Как работают электрические двигатели
- Принцип работы двигателя
- Работа синхронных двигателей
- Принцип действия машины постоянного тока
- Двигатели общепромышленного назначения
- 2. Принцип действия генератора постоянного тока, основное уравнение эдс и напряжения
- Датчики положения, двигатели без датчиков
- Генераторы с самовозбуждением. Принцип самовозбуждения генератора с параллельным возбуждением
Управление
Основные формулы, используемые при управлении ДПТ:
Скорость двигателя:
- ω=U−IRCΦ{\displaystyle \omega ={\frac {U-IR}{C\Phi }}}
где U{\displaystyle U} — подводимое к обмотке якоря напряжение,
I{\displaystyle I} — ток обмотки якоря,
R{\displaystyle R} — сопротивление цепи якоря,
C{\displaystyle C} — конструктивная постоянная,
Φ{\displaystyle \Phi } — поток, создаваемый обмоткой возбуждения.
Крутящий момент, развиваемый двигателем с независимым (параллельным) возбуждением, пропорционален току в обмотке якоря (ротора) (для двигателей последовательного возбуждения — момент приближённо пропорционален квадрату тока, так как поток пропорционален почти току):
M=CmΦI{\displaystyle M=C_{m}\Phi I}
ПротивоЭДС в обмотках якоря пропорциональна угловой частоте вращения ротора b при постоянном потоке возбуждения Φ :
-
- E=ke⋅ω{\displaystyle E=k_{e}\cdot \omega }, где ke{\displaystyle k_{e}} — коэффициент ЭДС двигателя, ω{\displaystyle \omega } — угловая скорость вращения ротора.
Общие способы управления ДПТ:
- изменение напряжения, подводимого к обмотке якоря;
- введение добавочного сопротивления в цепь якоря;
- изменение потока (регулирование возбуждения).
Механическая характеристика
Зависимость частоты от момента на валу ДПТ отображается в виде графика. Горизонтальная ось (абсцисс) — момент на валу ротора, вертикальная ось (ординат) — частота вращения ротора. Механическая характеристика ДПТ есть прямая, идущая с отрицательным наклоном.
Механическая характеристика ДПТ строится при определённом напряжении питания обмоток ротора. В случае построения характеристик для нескольких значений напряжения питания говорят о семействе механических характеристик ДПТ.
Регулировочная характеристика
Зависимость частоты вращения ротора от напряжения питания обмоток ротора ДПТ, отображается в виде графика. Горизонтальная ось (абсцисс) — напряжение питания обмоток ротора, вертикальная ось (ординат) — частота вращения ротора. Регулировочная характеристика ДПТ есть прямая, идущая с положительным наклоном.
Регулировочная характеристика ДПТ строится при определённом моменте, развиваемом двигателем. В случае построения регулировочных характеристик для нескольких значений момента на валу ротора, говорят о семействе регулировочных характеристик ДПТ.
Целесообразность применения машин постоянного тока и способы регулирования скорости вращения этих машин
Важнейшим достоинством всех рассмотренных машин постоянного тока является возможность плавного регулирования их частоты вращения в широких пределах.
В электроприводах с машинами постоянного тока это регулирование чаще всего осуществляется следующими способами: изменением напряжения в цепи якоря, импульсным питанием якорной цепи, изменением основного магнитного потока.
При регулирования напряжения в цепи якоря машины постоянного тока с независимым возбуждением подключается к источнику питания где возможна регулировка напряжения (генератор постоянного тока или полупроводниковые преобразователи). Скорость вращения при таком регулировании изменяется прямо пропорционально напряжению. Такое регулирование позволяет изменять скорость вращения двигателя только в сторону понижения от номинального значения, так как напряжение на якоре свыше номинального недопустимо. Обмотка возбуждения при этом питается от другого источника напряжения. В случае необходимости изменения направления вращения двигателя (реверсирования) изменяют направление тока якоря или возбуждения путем переключения полярности напряжения на соответствующих обмотках.
При регулировании скорости вращения импульсным питанием якоря его цепь периодически прерывается. Во время замыкания цепи якоря к его обмотке подводится напряжение и появляется ток. При размыкании этой цепи ток резко убывает. Таким образом, к обмотке якоря подводится некоторое среднее напряжение, которое зависит от частоты прерывания тока. Соответственно среднему напряжению изменяется и скорость вращения.
В машинах с электромагнитным возбуждением частота вращения регулируется третьим способом — изменением основного магнитного потока. Если уменьшить ток в обмотке возбуждения, то и уменьшится магнитный поток и возрастет скорость вращения вала. Так как токи возбуждения невелики, этот способ регулирования является довольно экономичным. Такой способ, в отличие от предыдущих способов, позволяет регулировать частоту вращения в сторону увеличения от номинального значения.
Для расширения диапазона регулирования скорости как в сторону повышения, так и в сторону понижения для машин постоянного тока с электромагнитным возбуждением применяют одновременное регулирование частоты вращения изменением токов якоря и обмотки возбуждения — или двухзонное регулирование.
Как работают электрические двигатели
Асинхронные двигатели
Силуминовый барабан вдоль линий магнитного поля содержит медные проводники. Разница в проводимости такова, что не проводится изоляции: ток несут красно-коричневые жилы. Поле, индуцированное статором ЭДС, слабое. Применяются специальные меры, помогающие разогнать вал. Магнитное поле ротора плохо цепляется, асинхронный двигатель стоит столбом. Действенная мера противодействия проблеме ограничивается созданием двойной беличьей клетки: вдоль барабана проходит на некоторой глубине второй ряд медных жил. Объединены торцами единой сетью.
На запуске частота тока, глубина проникновения поля велики. Включаются в работу оба слоя беличьей клетки. По мере разгона разница нивелируется, падает до нуля. Амплитуда поля снижается, рабочим остается внешний слой беличьей клетки
Обратите внимание, догнать поле ротор бессилен, проскальзывает, запаздывает. Поэтому двигатели получили название асинхронных
Англичане делают проще — зовут индукционными.
Если поле вращать со скоростью ротора, ЭДС перестает наводиться. Последует замедление, цикл повторится, начавшись разгоном. Ротор по-прежнему будет отставать от поля. Так работает устройство короткозамкнутого типа. Фазный ротор (спасибо Википедия), содержащий трехфазную обмотку, выполняет несколько функций, согласно назначению устройства:
- Подпитывается электричеством через кольцо токосъемника. Теперь ротор получает фазу и наводит на статоре ЭДС. Постепенно вал подхватывается полем, дальнейший процесс описан выше.
- Подпитывается постоянным током. Образуется синхронный двигатель.
- Снабжается реостатами, дросселями, регулирующими скорость.
- Реализует управление инвертором (усложненный первый случай).
Принцип действия асинхронных двигателей: используется наведенная ЭДС, скорость вращения неспособна догнать поле (пропадают токи). Иначе тип мотора меняется (синхронный). Для регуляции скорости часто используется амплитуда питающего напряжения. Способ годится двигателям асинхронного типа с короткозамкнутым, фазным ротором. Перечислим методики:
Работа двигателя переменного тока
- Для машин с короткозамкнутым ротором годятся:
- Регулирование частоты напряжения питания.
- Изменение числа пар полюсов статора. В результате меняется скорость вращения поля, давая нужный эффект.
- Для машин с фазным ротором допускается:
- Вводить реостат в цепь питания. Растут потери на скольжение, закономерно изменяя скорость.
- Применять специальные вентили. Энергия скольжения выпрямляется схемой Ларионова, подается в виде постоянного напряжения вспомогательному электрическому двигателю, нарезающему импульсы через управляемые извне тиристоры. Мощность, которая обычно терялась бы, возвращается. Через вал вспомогательного двигателя, трансформатор, обмотки которого частично включены в сеть питания. Управление скоростью выполняют внедрением дополнительной ЭДС. Делается либо напрямую (через источник питания), либо сдвигом угла включения тиристоров относительно питания. Частота отклоняется от номинала.
- Двигатель двойного питания является вариантом реализации регулировки скорости в оборудовании с фазным ротором. Тип чаще применяется для реализации схем генераторов. Ротор уплывает частотой вращения – двигатель все-таки асинхронный. Статор, ротор питаются отдельно. Позволяет для каждой обмотки задавать частоту, закономерно приводит к нужным изменениям скорости.
Асинхронным двигателям годится изменение амплитуды питания. Наибольшим КПД обладают вентильные схемы, самые дорогие.

Двигатель асинхронного типа
Принцип работы двигателя
Функционально двигатель принадлежит к классу синхронных машин обращенного типа, это объясняется тем, что статор и ротор поменяли выполнение задач. Статор выполняет функции по возбуждению магнитного поля, ротор принял задачи направленные на преобразование энергии.
Во время вращения якоря в магнитном поле, производимым статором в витках обмотки, наводится ЭДС. Направление ее движения находится по правилу правой руки.
После того как якорь и коллектор повернутся на 180оС виток меняет свои стороны, на противоположное направление меняется движение ЭДС.
Так, происходит процесс индуцирования переменной электродвижущей силы, выпрямляемой посредством коллектора.
Коллектор, через щеточный механизм, соединен с обеими сторонами витка, в результате этого происходит снятие щетками текущего в неизменном направлении пульсирующего напряжения, это способствует наличию во внешней цепи, идущего в постоянном направлении, пульсирующего тока. Для того чтобы снизить пульсацию в пазах якоря прибавляют добавочное количество витков.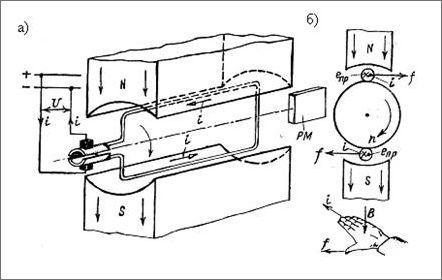
Предназначение некоторых конструктивных особенностей в устройстве двигателя
Двигатель, как и любая другая машина этого типа, содержит в своей конструкции статор, являющегося неподвижным элементом, и ротор (якорь) – вращающийся элемент машины, между ними находится воздушный зазор. В якоре двигателя происходит индуцирование ЭДС. Создание основного магнитного поля происходит при помощи главных полюсов, состоящих из сердечников и катушек возбуждения.
Равномерное распределение полученной магнитной индукции в области воздушного зазора, обеспечивается полюсными наконечниками.
Чередование полярности полюсов, во время движения электрического тока, достигается за счет соединения катушек главных полюсов в обмотку возбуждения.
Для улучшения коммутации предусмотрены добавочные полюса.
Уменьшение вихревых токов, которые появляются в результате перемагничивания якоря, в процессе его вращения в созданном магнитном поле, происходит за счет конструкции сердечника, исполненного из пластин электротехнической стали, для большего эффекта он покрывается специальным лаком.
Контакт внешней цепи машины с коллектором осуществляется за счет щеток, основным материалом для них является графит.
Область применения
Несмотря на то, что себестоимость этого типа двигателя намного дороже асинхронных машин, их особенности могут сыграть решающую роль в узкоцелевом специальном назначении.
С помощью таких двигателей приводятся в работу прокатные станы, они используются для привода гребного винта на кораблях, а также для транспортных средств, имеющих систему питания на постоянном токе.
Поэтому их область использования характерна для нужд, там, где необходима электрическая тяга, это: тепловозы, электровозы, электропоезда, городской транспорт, то есть там, где необходимо применить мягкие механические характеристики и широкие пределы регулировки количества оборотов вращения.
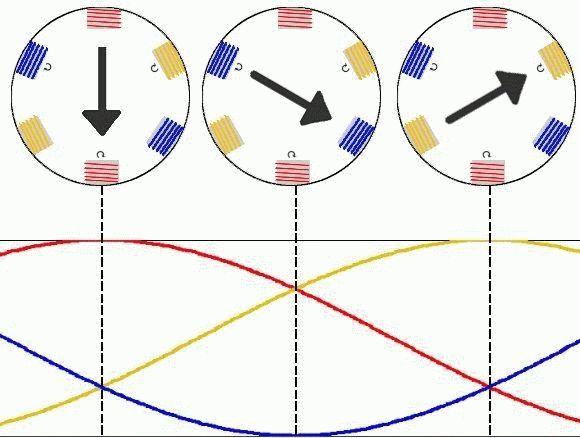
Работа синхронных двигателей
Проходились по коллекторным двигателям – рассказывали, как конструировать – поэтому пропускаем сегодня семейство. Бессильны иначе рассказать вещи гораздо интереснее: ведется много споров на форумах. Собираемся рассмотреть не совсем синхронные двигатели — генератор. Наподобие украшающих ГЭС.
Вы никогда не задумывались, как регулируется скорость вращения турбины, когда на лопасть падает поток воды? Створками направляющего аппарата? Нет. Генератор требует подпитки не только постоянным током, но и переменным. Первое подаётся на ротор, а второе – на статор. В результате вал не мог бы даже стронуться с места, но ему помогает вода. А вот энергия торможения потока уже преобразуется в ЭДС рабочих катушек статора, намотанных рядом со вспомогательными.
Фактически имеем на руках устройство электродвигателя переменного тока, среди обмоток большая часть генерирующих, снимается частота 50 Гц. Синхронность обеспечивается питающими напряжениями. Если вода слишком напирает, ток возбуждения растет, срыв оборотов предотвращается. Параллельно увеличивается выходная мощность электростанции. Частота определяет характеристики снимаемого напряжения, касательно номинала 50 Гц не допускаются отклонения более долей процента (0,1%).
Вал вращается со скоростью 1-2 оборота в секунду. Многочисленными генераторными обмотками, соединенными параллельно образует нужную форму синусоиды. Подчеркиваем, частота поддерживается напряжением возбуждения, следовательно, именно к нему и предъявляются повышенные требования. Требуется получить больше мощности электростанции, просто заслонки направляющего аппарата приоткрываются, масса воды начинает падать вниз. Лопасть быстрее не двигается, увеличивается ток возбуждения, закономерно вызывает возникновение более сильных полей.
Принцип действия электродвигателя переменного тока копирует сказанное, отсутствуют генераторные обмотки. Требуется получить больше мощности — увеличьте напряжение возбуждения, амплитуду по цепи питания. Усиливается сцепление полей, исключая проскальзывание. Понятно, большая масса вала неспособна набрать за мгновение 50 Гц (и не набирает), оборудование, изготовленное правильно, за короткий период достигает режима. Скорость зависит от количества полюсов.
Не успели сегодня рассмотреть технические характеристики электродвигателей переменного тока, многократно делали прежде, применительно к различного рода устройствам. Полагаем, в будущем обзоры могут вновь повернуться к теме бушпритом.
Принцип действия машины постоянного тока
Рассмотрим работу машины постоянного тока в режиме генератора на модели рис.2,
где 1 — полюсы индуктора, 2 — якорь, 3 — проводники, 4 — контактные щетки.
Проводники якорной обмотки расположены на поверхности якоря.
Внешние поверхности проводников очищены от изоляции, а на эти поверхности проводников
наложены неподвижные контактные щетки.
Контактные щетки размещены на линии геометрической нейтрали,
проведенной посредине между полюсами.
Приведем якорь машины во вращение в направлении, указанном
стрелкой.
Рис. 2
Определим направление ЭДС, индуктированных в проводниках
якорной обмотки по правилу правой руки.
На рис.2 крестиком обозначены ЭДС, направленные
от нас, точками — ЭДС, направленные к нам. Соединим проводники между собой так,
чтобы ЭДС в них складывались. Для этого соединяют последовательно конец проводника,
расположенного в зоне одного полюса с концом проводника, расположенного в зоне
полюса противоположной полярности (рис. 3)
Два проводника, соединенные последовательно, образуют один виток или одну
катушку. ЭДС проводников, расположенных в зоне одного полюса, различны по величине.
Наибольшая ЭДС индуктируется в проводнике, расположенном под срединой полюса,
ЭДС, равная нулю, — в проводнике, расположенном на линии геометрической нейтрали.
Рис. 3
Если соединить все проводники
обмотки по определенному правилу последовательно, то результирующая ЭДС якорной
обмотки равна нулю, ток в обмотке отсутствует. Контактные щетки делят якорную
обмотку на две параллельные ветви. В верхней параллельной
ветви индуктируется ЭДС одного направления, в нижней параллельной ветви — противоположного
направления. ЭДС, снимаемая контактными щетками, равна сумме электродвижущих
сил проводников, расположенных между щетками.
На рис. 4 представлена схема замещения якорной обмотки.
В параллельных ветвях действуют одинаковые ЭДС, направленные встречно
друг другу. При подключении к якорной обмотке сопротивления в параллельных ветвях
возникают одинаковые токи , через сопротивление
RH протекает ток IЯ.
Рис. 4
ЭДС якорной обмотки пропорциональна частоте вращения якоря n2 и магнитному
потоку индуктора Ф
(1)
е
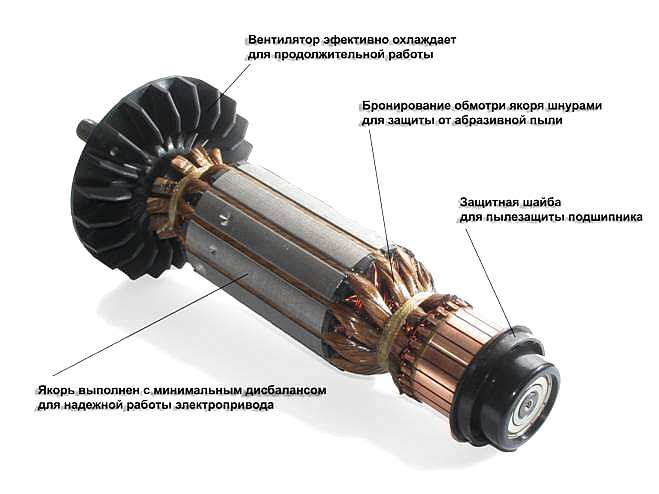
Якорь электродвигателя
Двигатели общепромышленного назначения
Конструкция электродвигателя постоянного тока общепромышленного назначения изображена на рис. 2.1.
Главные полюсы статора состоят из сердечников 4 и обмоток главного полюса 3.
Чаще всего из листов электротехнической стали набирают сердечники (шихтуют). Якорь двигателя состоит из сердечника 5, обмотки 2, коллектора с щеткодержателем 6 и вала якоря
Рисунок 2.1.Двигатель постоянного тока общепромышленного назначения
где: I — вентилятор, 2 — обмотка якоря, 3— обмотка главного полюса, 4 — сердечник главного полюса, 5 — сердечник якоря, 6 — коллектор
Из листов электротехнической стали набирается также и сердечник. Предварительно эти листы покрывают перед сборкой изолирующим лаком, чтобы уменьшить величину вихревых токов, которые возникают в результате перемагничивания. В пазы якоря уложена обмотка, которая состоит из секций. Концы ее припаиваются к пластинам коллектора. Для охлаждения двигателя на валу закрепляют вентилятор. Положение якоря фиксируется подшипниковыми щитами с подшипниками качения или скольжения. С помощью графитовых щеток осуществляют электрический контакт с внешней цепью питания электроэнергией. В щеткодержателе находятся щетки и прижимаются к коллектору пружинами.
Создание магнитного поля в машине постоянного тока называют возбуждением. По способу возбуждения машины подразделяют на:
- машины с независимым возбуждением. У них обмотку возбуждения подключают к независимому источнику тока и электрически она не соединяется с обмоткой якоря;
- машины с параллельного возбуждения (шунтовые). У такого рода машин обмотку возбуждения подключают параллельно к обмотке якоря и они запитываются от одного источника;
- машины с последовательного возбуждения (сериесные). У них обмотку возбуждения включают последовательно с обмоткой якоря;
- машины со смешанного возбуждения (компаундные) — имеет и последовательную и параллельную обмотку возбуждения;
- возбуждение от постоянных магнитов.
Электротехническая промышленность для станкостроения выпускает электродвигатели постоянного тока серии 2П с независимым, параллельным или смешанным возбуждением. Большой диапазон мощностей (0,37—200 кВт), а также частоты вращения вала(750— 3000 об/мин) двигателей этой серии. И они имеют довольно широкий диапазон регулирования скорости вращения вала делают их незаменимыми в автоматизированных электроприводах главного движения и подач.
Номинальные напряжения для двигателей данной серии 110, 220, 340, 440 В и соответственно частоты вращения 750, 1000, 1500, 2200 и 3000 об/мин. По конструктивным признакам, по роду защиты и охлаждения различают защитное, защищенное и закрытое исполнения, двигатели с самовентиляцией, с независимой вентиляцией, с естественным охлаждением, с обдувом от постоянного вентилятора. Выпускаются также двигатели со встроенными тахогенераторами. Конструктивное исполнение, наличие или отсутствие тахогенератора, охлаждение, габаритные размеры и климатическое исполнение указываются в обозначении двигателя. Например, 2ПФ160ЬГУ4 — электродвигатель постоянного тока серии 2П. Тип исполнения – защищенное. Охлаждение производится независимой вентиляцией от постороннего вентилятора (Ф). Высота оси вращения 160 мм, второй длины (Ь). С тахогенератором (Г), климатическое исполнение — У, категория размещения — 4.
Благодаря созданию новых магнитных материалов (таких, как магниты типа «альнико», самарийкобальтовые магниты, ферриты, редкоземельные магниты), обладающих отличными магнитными характеристиками, все более широкое применение получают двигатели постоянного тока с возбуждением от постоянных магнитов. В настоящее время только высокая стоимость магнитных материалов препятствует вытеснению ими двигателей с электромагнитным возбуждением.
Для использования в приводах подач станков помимо двигателей традиционного исполнения также применяют малоинерционные и высокомоментные двигатели постоянного тока.
2. Принцип действия генератора постоянного тока, основное уравнение эдс и напряжения
Возможность
построения механического генератора
появилась после открытия Фарадеем
закона электромагнитной индукции в
1831 г.
Если проводник
перемещать в магнитном поле так, чтобы
он пересекал магнитные линии, то на
концах проводника появится разность
потенциалов – эдс (электродвижущая
сила).
Простейшим
генератором является рамка на оси,
помещенная в магнитном поле (рис. 1.1),
которую вращают.
Рис.
1.1.
Схема работы машины переменного тока
Концы
проводников соединены с кольцами,
которые вращаются вместе с рамкой. На
кольцах помещены неподвижные щетки.
Присоединенный к щеткам вольтметр
покажет разность потенциалов, т.е. эдс
рамки, которая будет изменяться как по
величине, так и по направлению. Направление
эдс определяется по правилу правой
ладони, состоящему в следующем.
Ладонь
правой руки располагают в магнитном
поле так, чтобы линии магнитной индукции
были направлены в ладонь, а большой
палец отводят относительно других
пальцев в плоскости ладони на 90 градусов
и направляют по движению проводника;
тогда остальные пальцы руки покажут
направление наведенной в проводнике
эдс.
В
общем случае
 ,
,
если t,
t,
то
 .
.
С некоторым приближением допускаем,
что индукция под полюсами изменяется
по синусоидальному закону, тогда
 ,
,
где
– угол поворота, так как
 ,
,
то при
= const
вместо
можно горизонтальную ось обозначать
осью времени t.
Частота
наводимой переменной эдс
 ,
,
где
Т – период полного цикла изменения эдс
(рис. 1.2).
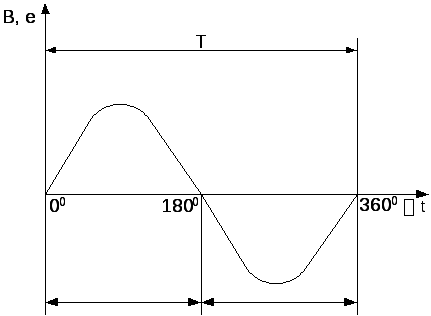
Рис.
1.2.
Синусоида индукции или эдс
Для
преобразования переменного тока в
постоянный применяют коллектор. Для
этого проводники простейшего генератора
соединяют с двумя медными полукольцами,
названными коллекторными пластинами
(рис. 1.3).
Рис.
1.3.
Схема работы машины постоянного тока
Пластины
жестко связаны с валом рамки, но
изолированы друг от друга. Щетки на
коллекторных пластинах устанавливаются
так, чтобы они переходили с одной
коллекторной пластины на другую в тот
момент, когда эдс равна нулю. Таким
образом, щетка контактирует с полукольцом
одного направления эдс. В этом случае
ток на щетках и по внешнему участку
цепи, через потребитель, протекает в
одном направлении, но величина его
изменяется с течением времени; эдс и
ток имеют пульсирующую форму (рис. 1.4).
Если взять n
рамок (обмотка якоря) и 2n
коллекторных пластин (коллектор), то
увеличится и число пульсирующих эдс за
период времени Т (рис. 1.5). Если пульсаций
менее 2 %, то ток считается постоянным.
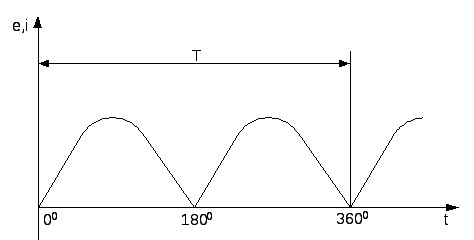
Рис.
1.4. Выпрямленная эдс
и ток
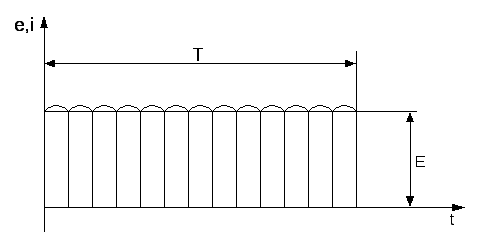
Рис.
1.5. Выпрямленная эдс
и ток в реальном генераторе
Таким
образом, в генераторе коллектор является
механическим выпрямителем, который
преобразовывает переменную эдс витков
якоря в постоянную эдс на щетках и цепи.
Совокупность витков составляет обмотку
якоря.
Если
к щеткам подсоединить потребитель
электрической энергии, то потечет
электрический ток, который в обмотке
якоря будет создавать падение напряжения.
Вследствие этого напряжение на зажимах
генератора будет меньше эдс на величину
падения напряжения в сопротивлении
обмотки якоря
 ,
,
(1.1)
где
а – индекс параметров якорной обмотки.
Формула
(1.1) является основным уравнением эдс и
напряжения генератора. Но на проводник
с током в магнитном поле действует
выталкивающая сила F,
направленная навстречу вращению. Ток
в обмотке якоря будет создавать
противодействующий вращению момент  .
.
Чем больше  ,
,
тем больше необходимо усилий для
преодоления противодействующего момента
 ,
,
(1.2)
где
 –диаметр
–диаметр
якоря;
 .
.
(1.3)
Датчики положения, двигатели без датчиков
Из вышесказанного важно уяснить, что подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора. Поэтому электроника должна уметь определять положение ротора двигателя
Для этого применяются датчики положения. Они могут быть различного типа, оптические, магнитные и т.д. В настоящее время очень распространены дискретные датчики на основе эффекта Холла (например SS41). В трехфазном бесколлекторном двигателе используется 3 датчика. Благодаря таким датчикам электронный блок управления всегда знает, в каком положении находится ротор и на какие обмотки подавать напряжение в каждый момент времени. Позже будет рассмотрен алгоритм управления трехфазным бесколлекторным двигателем.
Существуют бесколлекторные двигатели, которые не имеют датчиков. В таких двигателях положение ротора определяется путем измерения напряжения на незадействованной в данный момент времени обмотке. Эти методы также будут рассмотрены позднее
Следует обратить внимание на существенный момент: этот способ актуален только при вращении двигателя. Когда двигатель не вращается или вращается очень медленно, такой метод не работает
Генераторы с самовозбуждением. Принцип самовозбуждения генератора с параллельным возбуждением
Недостатком генератора с независимым возбуждением
является необходимость иметь отдельный источник питания. Но при определенных
условиях обмотку возбуждения можно питать током якоря генератора.
Самовозбуждающиеся генераторы имеют одну из трех схем: с параллельным,
последовательным и смешанным возбуждением. На рис. 10 изображен генератор
с параллельным возбуждением.
Обмотка возбуждения подключена параллельно якорной обмотке. В цепь возбуждения
включен реостат Rв. Генератор работает в режиме холостого хода.
Чтобы генератор самовозбудился, необходимо выполнение определенных
условий.
Первым из этих условий является наличие остаточного магнитного потока
между полюсами. При вращении якоря остаточный магнитный поток индуцирует
в якорной обмотке небольшую остаточную ЭДС.
Рис. 10
Вторым условием является согласное включение обмотки возбуждения.
Обмотки возбуждения и якоря должны быть соединены таким образом, чтобы ЭДС якоря
создавала ток, усиливающий остаточный магнитный поток. Усиление магнитного потока
приведет к увеличению ЭДС. Машина самовозбуждается и начинает устойчиво работать
с каким-то током возбуждения Iв = const и ЭДС Е = const, зависящими
от сопротивления Rв в цепи возбуждения.
Третьим условием является то, что сопротивление цепи возбуждения при данной частоте вращения должно быть меньше критического.
Изобразим на рис. 11 характеристику холостого хода генератора E = f (Iв) (кривая
1) и вольт — амперную характеристику сопротивления цепи возбуждения Uв
= Rв·Iв, где Uв — падение напряжения
в цепи возбуждения. Эта характеристика представляет собой прямую линию 2, наклоненную
к оси абсцисс под углом γ (tg γ ~ Rв).
Ток обмотки возбуждения увеличивает магнитный поток полюсов при согласном
включении обмотки возбуждения. ЭДС, индуцированная в якоре, возрастает, что
приводит к дальнейшему увеличению тока обмотки возбуждения, магнитного потока
и ЭДС. Рост ЭДС от тока возбуждения замедляется при насыщении магнитной цепи
машины.
Рис. 11
Падение напряжения в цепи возбуждения пропорционально росту
тока. В точке пересечения характеристики холостого хода машины 1 с прямой 2
процесс самовозбуждения заканчивается. Машина работает в устойчивом режиме.
Если увеличим сопротивление цепи обмотки возбуждения, угол
наклона прямой 2 к оси тока возрастает. Точка пересечения прямой с характеристикой
холостого хода смещается к началу координат. При некотором значении сопротивления
цепи возбуждения Rкр, когда
γ = γкр, самовозбуждение становится невозможным. При
критическом сопротивлении вольт — амперная характеристика цепи возбуждения становится
касательной к прямолинейной части характеристики холостого хода, а в якоре появляется
небольшая ЭДС.