Собираем простейший квадрокоптер своими руками
Содержание:
Инструкция по сборке простого беспилотника
Первое, что приходит на ум при сборке собственного квадрика — это, конечно же, его рама. Ничего сложного с этим элементом нет. Для ее основы сойдет обычная фанера размером 15 квадратных сантиметров. Лучи приспособляются с помощью винтов по диагональной разметке вашей рамы. Луч должен быть 30 сантиметровой длины начиная от центра коптера. Балки — 25см. Дырки для самих двигателей отложим на самый конец создания корпуса, предварительно сделав разметку по движкам.
А вот, собственно, то, что пригодится для самой сборки:
- Техника Turnigy 9;
- Плата управляющая;
- Аккумулятора для Turnigy;
- Силовой аккумулятор, чтобы коптер летал;
- Лопасти;
- Различные зарядные устройства для аккумуляторов.
Настраиваем прошивку
Сегодня достаточно легко найти необходимую прошивку, скачать и установить. После ее загрузки в Arduino, закачайте программу для настройки. Запустив программу, вы попадете в меню «Опции», там войдите в СОМ-порт Ардуино и в меню Экшн — АС2 Setup. Чтобы настройка квадролета получилась верной, старайтесь неукоснительно выполнять инструкции (подсказки) во время процесса установки и работы программы.
Так, например в одном диалоговом окне вам предложат двигать рычаги на передатчике до самых больших и малых значений, а в другом — попросят, чтобы вы проконтроллировали положение коптера. Он должен стоять ровно для точной калибровки датчиков.
Когда калибровка завершится, вам надо будет разомкнуть А5 с GND и в меню, в пункте АС2 Сенсор найдите вкладку Raw Sensor, чтобы проверить, верно ли работают датчики. При этом нужно ориентироваться на стрелкуВо время поворота нашей платы стрелка должна доходить до нужного значения. Если этого не происходит или она наоборот зашкаливает, значит у вас проблемы с датчиками или коэффицентами в коде.
Передатчик проверяется следующим образом, если уровни передвигаются как положено, то при нажатии на рычаг газа в течение пары секунд вправо и вниз, у вас будет мигать красный диод. Если же двигать стик вверх, то показатели должны быть идиентичными, то есть светодиод снова должен гореть красным цветом.
Общий принцип работы беспилотника

Как мы и говорили ранее, система является мультироторной. Эти самые роторы создают мощное диагональное вращение в противоположных направлениях. У этих роторов имеется так называемый управленец, собирающий информацию с трех, или с шести гироскопов (количество последних зависит от конфигурации коптера) и передает ее роторам.
Гироскопы (замудренное какое название), гироскопы были созданы для того, чтобы автоматически определять положение аппарата во время полета и затем фиксировать его во всех трех плоскостях. При этом акселерометр делает так, чтобы коптер занял идеальное положение по горизонтали. А чтобы закрепить квадрокоптер на определенной высоте, полетная система оборудуется бародатчиком.
За счет чего происходит движение коптера, если все четыре винта крутятся одинаково? А за счет простой смены скорости вращения той или иной пары моторов.Результатом становтися наклон коптера, или как его еще называют «крен» в сторону наиболее слабокрутящихся винтов и коптер летит по горизонтали.
Итак, общее представление о деталях и модулях будущего квадрокоптера у вас уже сложилось, теперь настала пора поделиться с вами тем, как же собрать дрон собственноручно.
Второй способ сборки квадрокоптера собственноручно

Не важно каким способом вы будете собирать свой первый сборный летательный аппарат, одно вам надо запомнить. Не жалейте денег на детали, из которых вы будете собирать дрон
Только в этом случае, с большей долей вероятности, сборка у вас получится более качественной и незначительные неточности и погрешности вам будут прощены, ну или почти прощены.
При сборке своего квадрокоптера вторым способом мы рассмотрим вариант с использованием Arduino Mega, прошивки Мега-Пират.
Что потребуется для сборки? 5 моторов, включая 1 запасной мотор. Приобретите также два комплекта лопастей, один рабочий, второй также для запаса. Напоминаем вам, что там должно быть два обычных винта и два с обратным вращением. Регуляторы скорости. Их должно быть не менее четырех штук (если вы собираете квадрокоптер). И опять же как минимум столько же запасных.
Советуем использовать несколько легких и маленьких. Да, дрон будет меньше летать в течение одного жизненного цикла такого мини-аккмулятора. Но при этом полет у вас будет более стабильным. Тем более, что процесс замены аккумулятора не займет много времени.
Рама для вашего квадрокоптера должна быть легкой и одновременно с этим прочной. Вспомните то, какую раму мы описали в первом случае самостоятельной сборки. Так вот, такая рама вполне подойдет и для этого варианта. Из электронной начинки необходимы будут: плата «Все в одном», акселерометр, батареи, микроконтроллер, гироскоп, а также множество болтиков, винтов, проводочков и различного вида стяжек. Не забудьте также про паяльник и дрель.
Когда вы убедитесь в том, что все необходимое у вас имеется в наличии, то можно смело приступать к сборке. Процесс сборки можно повторить, пользуясь первым методом, который был описан выше. Самое главное, чтобы от каждого конца луча и до центра рамы расстояние было одинаковым
Проследите за тем, чтобы пропеллеры не касались друг друга и, что важно — центральную часть рамы
Потому что именно там будут размещаться электронные мозги вашего дрона, плюс видеокамера, которую, кстати, можно установить по желанию.
Если вы вмонтируете ваши датчики в резину или, скажем в силиконовую массу, то этим самым сила вибрации во время работы пропеллеров будет погашена. В качестве шасси можно сделать и закрепить пенопласт на самых концах лучей. Для более мягкой посадки их можно прорезинить или прикрепить поролон.
Ну, а если вы не хотите собирать плату самостоятельно, то мы рекомендуем вам купить уже готовую плату, на которой уже установлено 4 датчика, гироскоп, который будет замерять угловое ускорение, акселерометр, измеряющий ускорение, барометр, отвечающий за выборы нужной высоты и удерживающий квадрокоптер именно на ней, а так же магнинтометр, отвечающий за то, куда будет лететь дрон.
Строительство тяжелого FPV квадрокоптера собственной конструкции на базе рамы Spidex
Предпосылки и потребности для самостоятельного строительства авиа дрона квадрокоптера следующие:
- На старом коптере не хватает места под навесное оборудование
- Хочется поставить большой аккумулятор и летать дольше и дальше
- Хочется иметь максимально жесткую раму, но обеспечивать виброизоляцию камеры от моторов.
- Хочется сделать квадрик с привлекательным видом, а не монстра на стандартной крестовидной раме с узлом проводов.
- Хочется сделать квадрокоптер легче конструкций на базe X525 но с большим аккумулятором
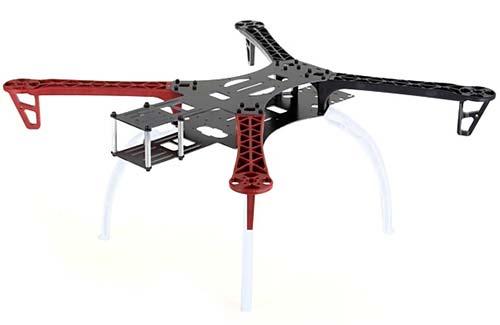
 Праобразом бщей формы авиа дрона послужила рама Spidex v2. Она имеет удачное расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Эта компоновка позволяет расположить камеру так, что пропеллеры не болтались на экране при любом наклоне коптера. Кроме того схема имеет хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. И наконец все это смотрится весьма прилично и внушительно. Но полностью копировать Spidex не имеет смысла. В числе его недостатков гнущиеся даже без аварий (просто под нагрузкой) алюминиевые трубки. Да и использование широко распространенной GoPro Hero HD2, без защитного корпуса Spidex не предусматривает. Как результат целесообразнее от Spdex берем общую компоновку а раму собираем самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с
Праобразом бщей формы авиа дрона послужила рама Spidex v2. Она имеет удачное расположение компонентов в одном уровне — камера спереди, потом смещенный вперед центр, и подвешенный сзади аккумулятор. Эта компоновка позволяет расположить камеру так, что пропеллеры не болтались на экране при любом наклоне коптера. Кроме того схема имеет хороший способ виброизоляции — камера и аккумулятор подвешиваются к двум горизонтальным трубам, которые в свою очередь монтируются на центр с помощью резиновых изоляторов. Масса аккумулятора помогает уменьшить вибрации, передающиеся нa камеру. И наконец все это смотрится весьма прилично и внушительно. Но полностью копировать Spidex не имеет смысла. В числе его недостатков гнущиеся даже без аварий (просто под нагрузкой) алюминиевые трубки. Да и использование широко распространенной GoPro Hero HD2, без защитного корпуса Spidex не предусматривает. Как результат целесообразнее от Spdex берем общую компоновку а раму собираем самостоятельно, используя стеклопластиковые пластины и карбоновые трубы с  зажимами. Вам понадобятся карбоновыe трубки (16×14 мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой друго мелочевки по списку.Электроника в составе коптера следующая:
зажимами. Вам понадобятся карбоновыe трубки (16×14 мм, метровой длины, три штуки — для рамы нужны будут две, ну и про запас), зажимы для них вместе с подходящими винтами/гайками (из набора FCP HL от Flyduino), провода для прокладки через трубки к моторам, виброизоляторы (сайлент-блоки под М3), и куча всякой друго мелочевки по списку.Электроника в составе коптера следующая:
- Моторы: 4x NTM 28-30 750kv
- Контроллеры моторов: 4x HobbyKing Blue Series 30A, с прошивкой SimonK
- Пропеллеры: 4x Graupner E-Prop 11×5
- Плата управления: Crius MultiWii SE v0.1, с MultiWii 2.2
- Аккумуляторы: Turnigy Nanotech 4S 4500mAh 25-35C
- Камера: GoPro HD Hero2
- Видеопередатчик: ImmersionRC 5.8G 25mW
- Антенна: Clowerleaf 5.8G, DIY от умельца на местном форуме
- OSD: MinimOSD с прошивкой KV Team OSD для MultiWii 2.2
- GPS: Drotek I2C GPS
- Радиоприемник: Graupner HoTT GR-16, под мой передатчик (MX-16)
Процесс сборки
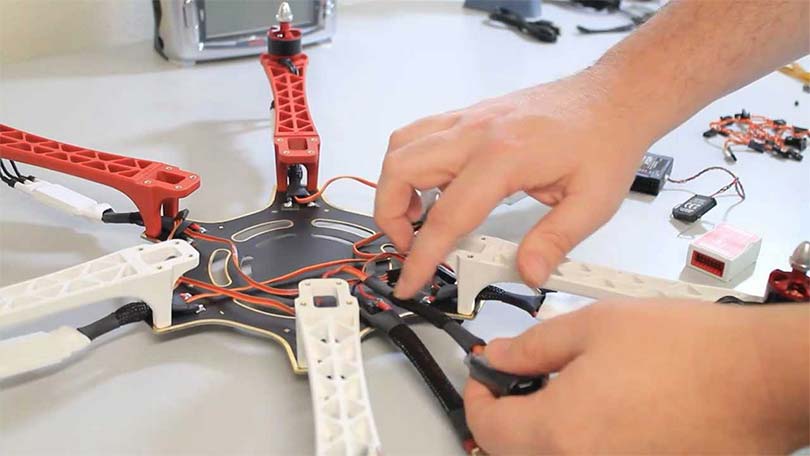
 Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилим из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо. Примеряем зажимы к нижнему центру. Центр собираем для проверки, все ли стыкуется как надо. Прикручиваем все остальные части рамы. Похоже, что почти готово? Но… Оси моторов обрезаем — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь… … и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки одеть обязательно. Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода. Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо много — и это всeго лишь квадрик. Размещаем контроллеры на нижней полураме. Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано! Изолируем контроллеры новой термоусадкой, когда все кабеля на месте. Устанавливаем контроллеры моторов на
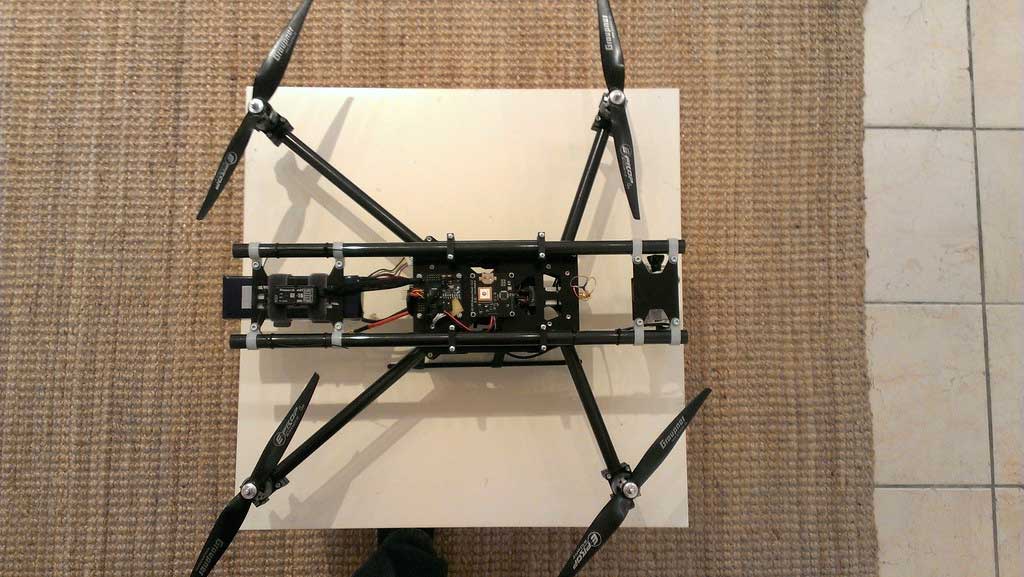
Для начала пилим трубки под нужную длину — 22см и 28см, все четыре пилим из одной метровой трубки. Пилкой для металла с мелкими зубьями идет очень хорошо. Примеряем зажимы к нижнему центру. Центр собираем для проверки, все ли стыкуется как надо. Прикручиваем все остальные части рамы. Похоже, что почти готово? Но… Оси моторов обрезаем — они выступают с задней стороны, и мешают установке сверху трубок. Обклеиваем мотор клейкой лентой, дабы не допустить попадания металлических опилок внутрь… … и Дремелем его, Дремелем. Дремель режет 3-миллиметровую ось как нож масло. Главное защитные очки одеть обязательно. Снимаем термоусадку с контроллеров моторов, чтобы припаять новые провода. Провода нарезаны под нужную длину. Припаиваем разъмы для моторов. По три фазы на мотор, паять надо много — и это всeго лишь квадрик. Размещаем контроллеры на нижней полураме. Прикручиваем мотор и проводим кабеля через трубку. Всe собирается, как запланировано! Изолируем контроллеры новой термоусадкой, когда все кабеля на месте. Устанавливаем контроллеры моторов на  их окончательную позицию. Проводов многовато, но достаточно чисто. Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком… Далее стягиваем тонкой медной проволокой… Далее спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее. Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху. Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором. Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик. Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки. Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода… Ура все готово! Облегчить конструкцию не удалось, однако все сомнения были полностью развеяны во время первого полета.
их окончательную позицию. Проводов многовато, но достаточно чисто. Разводка проводов от аккумулятора, методом RCExplorer. Сначала собираем провода от контроллеров пучком… Далее стягиваем тонкой медной проволокой… Далее спаиваем, и изолируем термоусадкой. Соединение получается механически крепкое, и хорошо проводящее. Примеряем итоговую сборку: все совпадает! Верхняя полурама еще не прикручена, просто лежит сверху. Верхняя полурама с управляющей электроникой в центре (контроллер и GPS) и виброизолированными трубками с камерой и аккумулятором. Видеооборудование нa нижней стороне верхнего центра: видеокабель из камеры идет в MinimOSD, там на него накладывается информация из полетного контроллера, и дальше в видеопередатчик. Нижняя полурама готова к установке верхней. Моторы приподняты, чтобы зажимы в центре не распались, когда будут откручены временные гайки. Устанавливаем и прикручиваем верхнюю полураму. Затягиваем гайки, соединяем всe провода… Ура все готово! Облегчить конструкцию не удалось, однако все сомнения были полностью развеяны во время первого полета.
Аппарат получился удачный.
Проводка
С помощью переходников сделайте параллельное соединение 4х проводов питания.. В том месте, где батарея будет подключаться ко всем четырем проводам нужно будет воспользоваться разъемными соединения. В остальных местах необходима будет спайка, затем затяните все детали в термоусадку, чтобы во время сильной вибрации (когда коптер будет летать) что-нибудь не выскочило и не отсоединилось.
Теперь займемся управляющей платой и подключаем провода драйверов. В принципе, после этой операции можно сделать небольшую проверку и устранить проблемы, которые выявятся при тестировании.