Если Вы уже зарегестрированны, вводите данные для входаЕсли Вы еще не зарегистрировались Тогда заполните поляООО Свой Мастер PoliStyle
Содержание:
- Асинхронные электродвигатели
- Работа электродвигателя постоянного тока
- Принцип действия современных электродвигателей
- ЭЛЕКТРОДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА АСИНХРОННЫЙ
- Принцип работы электродвигателя разновидности и типы
- Вентильные реактивные электродвигатели
- Принцип действия
- Как работает ротор
- Двигательная система
- Как работает двигатель постоянного тока
- Статор элетродвигателя
- Преимущества и недостатки электромобилей перед машинами с ДВС
- Асинхронный двигатель. Принцип работы.
Асинхронные электродвигатели
В предыдущих разделах мы разобрали, почему электродвигатели переменного тока называют также индукционными электродвигателями, или электродвигателями типа «беличье колесо». Далее объясним, почему их ещё называют асинхронными электродвигателями
В данном случае во внимание принимается соотношение между количеством полюсов и числом оборотов, сделанных ротором электродвигателя
Частоту вращения магнитного поля принято считать синхронной частотой вращения (Ns). Синхронную частоту вращения можно рассчитать следующим образом: частота сети (F), умноженная на 120 и разделенная на число полюсов (P).
Если, например, частота сети 50 Гц, то синхронная частота вращения для 2-полюсного электродвигателя равна 3000 мин-1.
Синхронная частота вращения уменьшается с увеличением числа полюсов. В таблице, приведенной ниже, показана синхронная частота вращения для различного количества полюсов.
Синхронная частота вращения для различного количества полюсов
Работа электродвигателя постоянного тока
Под токосъемником простейшего двигателя две секции. Выродился барабан коллектора. Каждая контактная ламель (пластинка на валу) занимает половину оборота. Одна щетка снабжается положительным потенциалом, вторая — отрицательным, сообразно меняется направление магнитного поля полюсов. Активными в каждый момент времени являются два (в описанной выше конструкции). Статора может формироваться постоянным электрическим полем, либо металлическим магнитом. Последнее применяется детскими машинками.
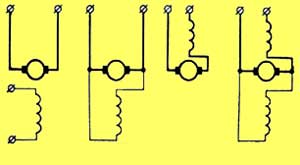
Как работает электродвигатель постоянного тока. Допустим, в начальный момент времени обмотки расположены так, как показано на рисунке. В нашем примере полюсов уже не два, как обсуждали выше, — три. Минимальное число для стабильного запуска электрического двигателя постоянного тока в нужном направлении. Обмотки соединены схемой звезды, у каждой пары одна общая точка. Напряженность поля формирует два полюса отрицательных, один положительный. Постоянный магнит стоит, как показано рисунком.

Упрощенный рисунок случая постоянного тока
Каждую треть оборота происходит перераспределение поля так, что полюса сдвигаются согласно изменению напряжения питания на ламелях. На второй эпюре видим: номера обмоток сдвинулись, картина в пространстве осталась. Залог стабильности: один полюс притягивается к постоянному магниту, второй отталкивается. Если нужно получить реверс, меняется полярность подключения батарейки (аккумулятора). В результате получается два положительных полюса, один отрицательный. Вал станет двигаться против часовой стрелки.
Полагаем, принцип действия электродвигателя постоянного тока теперь понятен. Добавим, сегодня распространены двигатели вентильного типа. Многие задумались заставить поля чередоваться на статоре, ротор представлял бы постоянный магнит. В первом приближении двигатель вентильного типа. Постоянный ток подается на нужные обмотки статора через коммутируемые ключи-тиристоры. В результате создается нужное распределение поля.
Преимущества схемы в снижении количества трущихся частей, являющихся причиной необходимости обслуживания, ремонта. Тиристорный блок управления достаточно сложный. Допускается организовать коммутацию при помощи ламелей. Одновременно конструкция послужит грубым датчиком положения вала (плюс минус расстояние между контактными площадками оси вала). Вентильные двигатели не новы. Широко применяются специфическими отраслями. Помогают точно выдержать частоту вращения. В быту вентильные двигатели найти сложно. Некое подобие можно лицезреть в стиральной машине. Речь о помпе слива воды (ротор магнитный, только ток переменный).
Технические характеристики электродвигателей постоянного тока лучше, нежели при питании переменным током. Класс устройств широко применяется. Чаще электродвигатели постоянного тока используются при питании батареями различного рода. Когда нет выбора. Преимущества схемы питания позволят аккумуляторам дольше продержаться.
Обмотки статора, ротора включают последовательно, параллельно. Последнее применяется при нагруженном в исходном состоянии валу. Наблюдается резкое повышение оборотов, может привести к негативным последствиям, если ротор слишком легко идет. Упоминали о подобных тонкостях в теме конструирования двигателей своими руками.
Принцип действия современных электродвигателей
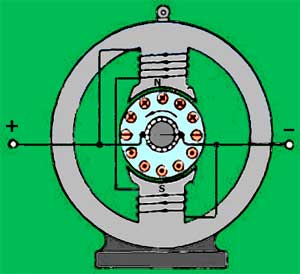
Современный двигатель постоянного тока вместо одной рамки имеет якорь с множеством проводников, уложенных в пазы, а вместо постоянного подковообразного магнита имеет статор с обмоткой возбуждения с двумя и более полясами. На рисунке показан двухполюсный электромотор в разрезе. Принцип его работы следующий. Если по проводам верхней части якоря пропустить ток движущийся «от нас» (отмечено крестиком), а в нижней части — «на нас» (отмечено точкой), то согласно правилу левой руки верхние проводники будут выталкиваться из магнитного поля статора влево, а проводники нижней половины якоря по тому же принципу будут выталкиваться вправо. Поскольку медный провод уложен в пазах якоря, то, вся сила воздействия будет передаваться и на него, и он будет проворачиваться. Дальше видно, что когда проводник с направлением тока «от нас» провернётся вниз и станет против южного полюса создаваемого статором, то он будет выдавливаться в левую сторону, и произойдёт торможение. Чтобы этого не случилось нужно поменять направление тока в проводе на противоположное, как только будет пересечена нейтральная линия. Это делается с помощью коллектора – специального переключателя, коммутирующего обмотку якоря с общей схемой электродвигателя.
Таким образом, обмотка якоря передаёт вращающий момент на вал электромотора, а тот в свою очередь приводит в движение рабочие механизмы любого оборудования, такого как, например, станок для сетки рабицы. Хотя в этом случае используется асинхронный двигатель переменного тока, основной принцип его работы идентичен принципу действия двигателя постоянного тока – это выталкивание проводника с током из магнитного поля. Только у асинхронного электромотора вращающееся магнитное поле, а у электродвигателя постоянного тока – поле статичное.
Продолжая тему двигателя постоянного тока нужно отметить, что принцип действия электродвигателя основывается на инвертировании постоянного тока в якорной цепи, чтобы не было торможения, и вращение ротора поддерживалось в постоянном ритме. Если изменить направление тока в возбуждающей обмотке статора, то, согласно правилу левой руки, изменится направление вращения ротора. То же самое произойдёт, если мы поменяем местами щёточные контакты, подводящие питание от источника к якорной обмотке. А вот если поменять «+» «-» и там и там, то направление вращения вала не изменится. Поэтому, в принципе, для питания такого мотора можно использовать и переменный ток, т.к. ток в индукторе и якоре будет меняться одновременно. На практике такие устройства используются редко.
Что касается электрической схемы включения двигателя, то их несколько и они показаны на рисунке. При параллельном соединении обмоток, обмотка якоря делается из большого количества витков тонкой проволоки. При таком подключении коммутируемый коллектором ток будет значительно меньше из-за большого сопротивления и пластины не будут сильно искрить и выгорать. Если делать последовательное соединение обмоток индуктора и якоря, то обмотка индуктора делается из провода большего диаметра с меньшим количеством витков, т.к. весь якорный ток устремляется через статорную обмотку. При таких манипуляциях с пропорциональным изменением значений тока и количества витков, намагничивающая сила остаётся постоянной, а качественные характеристики устройства становятся лучше.
На сегодняшний день двигатели постоянного тока мало используются на производстве. Из недостатков этого типа электрических машин можно отметить быстрый износ щёточно-коллекторного узла. Преимущества – хорошие характеристики запуска, лёгкая регулировка частоты и направления вращения, простота устройства и управления.
ЭЛЕКТРОДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА АСИНХРОННЫЙ
Наиболее распространенный тип асинхронного двигателя – это электродвигатель с короткозамкнутым ротором типа «беличья клетка», где в наклонные пазы ротора уложен набор токопроводящих стержней, с торцов соединенных кольцами.
История этого типа электродвигателей насчитывает более сотни лет, когда было замечено, что токопроводящий предмет, помещенный в зазор сердечника электромагнита переменного тока, стремится вырваться из него за счет возникновения в нем ЭДС индукции с противонаправленным вектором.
Таким образом, асинхронный двигатель с короткозамкнутым ротором не имеет каких-либо механических контактирующих узлов, кроме опорных подшипников ротора, что обеспечивает моторам такого типа не только низкую цену, но и высочайшую долговечность. Благодаря этому электродвигатели такого типа стали наиболее распространенными в современной промышленности.
Однако им присущи и определенные недостатки, которые приходится учитывать при проектировании асинхронных электродвигателей подобного типа:
Высокий пусковой ток – так как в момент включения асинхронного бесколлекторного электродвигателя в сеть на реактивное сопротивление обмотки статора еще не влияет магнитное поле, создаваемое ротором, возникает сильный бросок тока, в несколько раз превосходящий номинальный ток потребления.
Эту особенность работы двигателей подобного типа необходимо закладывать во все проектируемое электроснабжение во избежание перегрузок, особенно при подключении асинхронных электродвигателей к мобильным генераторам с ограниченной мощностью.
Низкий пусковой момент – электродвигатели с короткозамкнутой обмоткой имеют ярко выраженную зависимость крутящего момента от оборотов, поэтому их включение под нагрузкой крайне нежелательно: значительно увеличиваются время выхода на номинальный режим и пусковые токи, обмотка статора перегружается.
Так, например, происходит при включении глубинных насосов – в электроцепях их питания приходится учитывать пяти-семикратный запас по току.
Невозможность непосредственного запуска в цепях однофазного тока — для того, чтобы ротор начал вращаться, необходим стартовый толчок либо введение дополнительных фазных обмоток, сдвинутых по фазе друг относительно друга.
Для запуска асинхронного электродвигателя переменного тока в однофазной сети используется либо вручную коммутируемая пусковая обмотка, отключаемая после раскрутки ротора, либо вторая обмотка, включенная через фазовращательный элемент (чаще всего – конденсатор необходимой емкости).
Особенности подключения электрических двигателей рассматриваются на этой странице.
Отсутствие возможности получения высокой частоты вращения — хотя вращение ротора и не синхронизировано с частотой вращения магнитного поля статора, но и не может его опережать, поэтому в сети 50 Гц максимальные обороты для асинхронного электродвигателя с короткозамкнутым ротором – не более 3000 об/мин.
Увеличение частоты вращения асинхронного двигателя требует применения частотного преобразователя (инвертора), что делает такую систему дороже, чем коллекторный двигатель. Кроме того, при увеличении частоты возрастают реактивные потери.
Трудность организации реверса — для этого необходима полная остановка двигателя и перекоммутация фаз, в однофазном варианте – смещение фазы в пусковой или второй фазной обмотке.
Наиболее удобно использование асинхронного электродвигателя в промышленной трехфазной сети, так как создание вращающегося магнитного поля при этом осуществляется самими фазными обмотками без дополнительных приспособлений.
Фактически цепь, состоящую из трехфазных генератора и электромотора, можно рассматривать как пример электро трансмиссии: привод генератора создает в нем вращающееся магнитное поле, преобразуемое в колебания электрического тока, в свою очередь возбуждающего вращение магнитного поля в электродвигателе.
Кроме того, именно при трехфазном питании асинхронные электродвигатели имеют наибольший КПД, так как в однофазной сети создаваемое статором магнитное поле по сути может быть разложено на два противофазных, что увеличивает бесполезные потери на перенасыщение сердечника. Поэтому мощные однофазные электродвигатели как правило выполняются по коллекторной схеме.
Принцип работы электродвигателя разновидности и типы
На сегодняшний день наиболее распространенными считаются двигатели, которые имеют магнитоэлектрический тип. Есть еще тип электродвигателей, которые называют гистерезисные, однако они не являются распространенными. Первый тип электродвигателей, магнитоэлектрического вида, могут подразделяться еще на два подтипа, а именно электродвигатели постоянного тока и двигатели переменного тока.
Первый вид двигателей осуществляет свою работу от постоянного тока, эти типы электродвигателей используются тогда, когда возникает необходимость регулировки скоростей. Данные регулировки осуществляются посредством изменений напряжения в якоре. Однако сейчас существует большой выбор всевозможных преобразователей частот, поэтому такие двигатели стали применяться все реже и реже.

Двигатели переменного тока соответственно работают посредством действия тока переменного типа. Здесь так же имеется своя классификация, и двигатели делятся на синхронные и асинхронные. Их основным различием становится разница во вращении необходимых элементов, в синхронном движущая гармоника магнитов движется с той же скоростью, что и ротор. В асинхронных двигателях наоборот, ток возникает за счет разницы в скоростях движения магнитных элементов и ротора.
Благодаря своим уникальным характеристикам и принципам действия электродвигатели на сегодняшний день распространенны гораздо больше, чем скажем двигатели внутреннего сгорания, поскольку они обладают рядом преимуществ перед ними. Так коэффициент полезного действия электродвигателей является очень высоким, и может достигать почти 98%. Так же электродвигатели отличаются высоким качеством и очень долгим рабочим ресурсом, они не издают много шума, и во время работы практически не вибрируют. Большим преимуществом такого типа двигателей является то, что они не нуждаются в топливе, и как результат не выделяют в атмосферу никаких загрязняющих веществ. К тому их использование является намного более экономичным, по сравнению с двигателями внутреннего сгорания.
Ссылка на promplace.ru обязательна
Вентильные реактивные электродвигатели
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.

Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
Принцип действия
Устройство электродвигателя коллекторного демонстрирует, как прибор преобразует электрическую энергию в механическую и в обратном направлении. Это говорит о его возможности использования в качестве генератора. Стоит более подробно рассмотреть коллекторный электродвигатель, схема которого продемонстрирует его возможности.
Законы физики ясно говорят о том, что при пропускании электрического тока сквозь проводник, находящийся в магнитном поле, появляется воздействие на него определенной силы. При этом работает правило правой руки, оказывающее непосредственное влияние на мощность электродвигателя. Коллекторный электродвигатель работает именно по такому основному принципу.
Физика учит нас тому, что основой создания нужных вещей служат маленькие правила. Это и послужило базой для создания рамки, вращающейся в магнитном поле, что и позволило создать коллекторный электродвигатель. Схема показывает, что в магнитное поле помещена пара проводников, ток которых направлен в противоположные стороны, а значит, и силы тоже. Их сумма и дает необходимый крутящий момент. Устройство электродвигателя намного сложнее, так как в него добавлен целый комплекс необходимых элементов, в частности, коллектор, обеспечивающий одинаковое направление тока над полюсами. Неравномерность хода была устранена за счет размещения еще нескольких катушек на якоре, при этом постоянные магниты были заменены на катушки, что позволило уйти от необходимости использования постоянного тока. Это позволило придать крутящему моменту единое направление.
Как работает ротор
Теперь необходимо рассмотреть, какие процессы возникают во вторичной обмотке. Асинхронный двигатель с короткозамкнутым ротором имеет конструкционную особенность. Дело в том, что к его якорной обмотке напряжение не подводится. Оно там возникает благодаря магнитоиндукционной связи с первичной обмоткой. Поэтому и происходит процесс, обратный тому, что наблюдался в статоре, в соответствии с законом, который гласит, что при пересечении проводника, а в нашем случае это короткозамкнутая обмотка ротора, магнитным потоком в нём возникает электрический ток. Откуда берётся магнитное поле? Оно возникло вокруг первичной катушки при подключении трёхфазного источника питания.
Двигательная система
Для того, чтобы разобраться в том, как едет электрический автомобиль, нужно сперва разобраться в типах электродвигателей и их характеристиках:
- электромоторы переменного тока;
- электромоторы постоянного тока.
Как вы помните из школьного курса физики, переменный ток создается с помощью огромного магнитного сердечника, который вращается внутри ферромагнитного кожуха. Каждый раз, когда магнит совершает один полный оборот, направление электрического потока в схеме меняется. И это называется переменным током.
А если электричество по схеме течет в одном направлении, то такой ток называется постоянным. Самый наглядный пример таких схем – аккумуляторы и батарейки, которые установлены в будильниках, смартфонах, пультах управления и так далее.
Сперва были попытки сделать авто на электрическом моторе переменного тока. Но тогда потери электричества были просто катастрофическими. К тому же в авто нужно было вставить генератор изменения направления тока. А это потеря драгоценного места и увеличение веса автомобиля. Такие характеристики машины не устроили конструкторов. В итоге было решено исходить из использования постоянного тока.
В конечном счете под авто поставили огромный аккумулятор, выдающий постоянный ток, а к каждому из четырех колес подключили по электродвигателю, работающему на постоянном токе. Схема была предельно проста, и поэтому она сработала. Осталось решить пару вопросов: охлаждение, распределение тока и несколько других.

Поэтому неподготовленный водитель с огромным стажем может испытать шок от созерцания отделения капота, здесь находится полноценное багажное отделение, а не привычные «потроха» автомобиля с ДВС.
Как работает двигатель постоянного тока
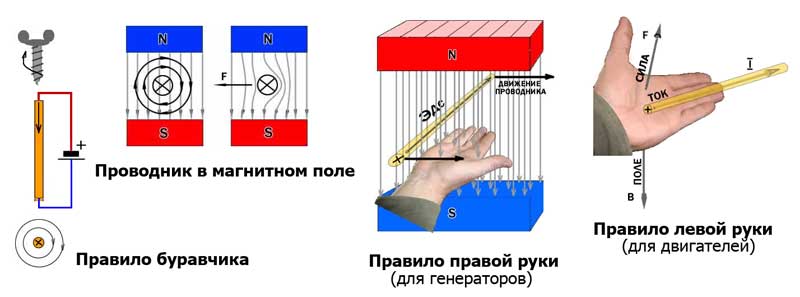
Подавляющее большинство электрических машин работает по принципу магнитного отталкивания и притяжения. Если между северным и южным полюсами магнита поместить проволоку и пропустить по ней ток, то её вытолкнет наружу. Как это возможно? Дело в том, что проходя по проводнику, ток формирует вокруг себя круговое магнитное поле по всей длине провода. Направление этого поля определяют по правилу буравчика (винта). При взаимодействии кругового поля проводника и однородного поля магнита, между полюсами магнитное поле с одной стороны ослабевает, а с другой усиливается. То есть среда становится упругой и результирующая сила выталкивает провод из поля магнита под углом 90 градусов в направлении, определяемом по правилу левой руки (правило правой руки используется для генераторов, а правило левой руки подходит только для двигателей). Эта сила называется «амперовой» и её величина определяется по закону Ампера F=BхIхL, где В – значение магнитной индукции поля; I – ток, циркулирующий в проводнике; L – длина провода.
Это явление использовали как основной принцип работы первых электродвигателей, этот же принцип используют и поныне. В двигателях постоянного тока малой мощности для создания постоянного магнитного поля применяются постоянные магниты. В электромоторах средней и большой мощности однородное магнитное поле создают с помощью обмотки возбуждения или индуктора.
Рассмотрим принцип создания механического движения с помощью электричества более подробно. На динамической иллюстрации показан простейший электромотор. В однородном магнитном поле вертикально располагаем проволочную рамку и пропускаем по ней ток. Что происходит? Рамка проворачивается и по инерции двигается какое-то время до достижения горизонтального положения. Это нейтральное положение – мёртвая точка — место, где воздействие поля на проводник с током равно нулю. Чтобы движение продолжилось, нужно добавить ещё хотя бы одну рамку и обеспечить переключение направление тока в рамке в нужный момент. На обучающем видео внизу страницы хорошо виден этот процесс.
Статор элетродвигателя
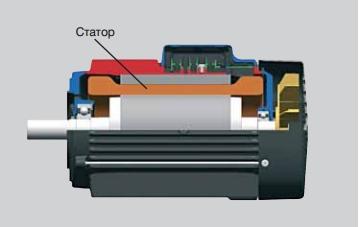
Статор – это неподвижный электрический компонент электродвигателя. Он включает в себя несколько обмоток, полярность которых всё время меняется при прохождении через них переменного тока (AC). Таким образом, создаётся комбинированное магнитное поле статора.
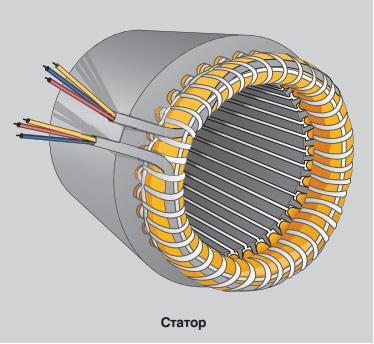
Все статоры устанавливаются в раму или корпус. Корпус статора электродвигателей Grundfos для электродвигателей мощностью до 22 кВт чаще всего изготавливается из алюминия, а для электродвигателей с большей мощностью – из чугуна. Сам статор устанавливается в кожухе статора. Он состоит из тонких пластин электротехнической стали, обмотанных изолированным проводом. Сердечник состоит из сотен таких пластин. При подаче питания переменный ток проходит по обмоткам, создавая электромагнитное поле, перпендикулярное проводникам ротора. Переменный ток (AC) вызывает вращение магнитного поля.
Изоляция статора должна соответствовать требованиям IEC 62114, где приведены различные классы защиты (по уровням температуры) и изменения температуры (AT). Электродвигатели Grundfos имеют класс защиты F, а при увеличении температуры – класс B. Grundfos производит 2-полюсные электродвигатели мощностью до 11 кВт и 4-полюсные электродвигатели мощностью до 5,5 кВт. Более мощные электродвигатели Grundfos закупает у других компаний, уровень качества продукции которых соответствует принятым в Grundfos стандартам. Для насосов, в основном, используются статоры с двумя, четырьмя и шестью полюсами, так как частота вращения вала электродвигателя определяет давление и расход насоса. Можно изготовить статор для работы с различными напряжениями, частотами и мощностями на выходе, а также для переменного количества полюсов.
Преимущества и недостатки электромобилей перед машинами с ДВС
Начнем с преимуществ:
- Экологичность (для многих возможность оставить своим детям чистую планету находится превыше всего).
- Долговечность.
- Простота в использовании.
- Отличный КПД.
- Не нужна коробка передач.
- Сами электродвигатели для электромобилей имеют весьма малые размеры. Некоторые экземпляры располагаются непосредственно в колесе. Такую систему называют мотор-колесо.
Минусы:
- Есть сложности в питающих элементах. До тех пор, пока ученые не изобретут инновационных банков энергии, машины с электрическим приводом будут много стоить и весить именно из-за аккумуляторов.
Этот недостаток касается именно России и близлежащих стран. Навряд ли в скором времени у нас появятся обширные сети заправочных станций для электрических машин, поэтому покупка данного авто оправдана лишь тогда, когда вы постоянно находитесь в мегаполисе.
Охлаждение. Если оно недостаточное, то ресурс аккумулятора будет не слишком велик
Поэтому при выборе машины стоит уделить системе охлаждения особое внимание.

Асинхронный двигатель. Принцип работы.
Асинхронный двигатель – это асинхронная электрическая машина переменного тока в двигательном режиме, у которой частота вращения магнитного поля статора больше чем частота вращения ротора.
Принцип работы берет основу из создания вращающегося магнитного поля статора, о чем подробнее вы можете почитать из указанной ссылки.
Асинхронные двигатели – одни из самых распространённых электрическим машин, и зачастую являются одним из основных преобразователей электрической энергии в механическую энергию. Самым большим достоинством является отсутствие контакта между подвижными и подвижными частями ротора, я имею ввиду электрический контакт, к примеру, в двигателях постоянного тока через щетки и коллектор. Однако это справедливо только к АД с короткозамкнутым ротором, в асинхронных двигателях с фазным ротором, этот контакт имеет место, но об этом чуть позже.
Конструкция асинхронного двигателя.
Рассмотрим конструкцию, примером послужит асинхронный двигательс короткозамкнутым ротором, но так же существует фазный тип ротора. Асинхронный двигатель состоит из статора и ротора между которыми воздушный зазор. Статор и ротор в свою очередь еще имеют так называемые активные части – обмотка возбуждения (отдельно статорная и отдельно роторная) и магнитопровод (сердечник). Все остальные детали АД, такие как: вал, подшипники, вентилятор, корпус, и т.п. – чисто конструктивные детали, обеспечивающие защиту от окружающей среды, прочность, охлаждение, возможность совершать вращение.
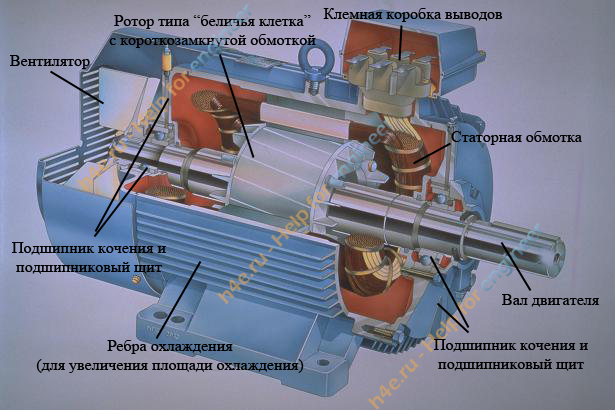
Рисунок 1 – Конструкция асинхронного двигателя.
Статор представляет собой трёх (или много)-фазную обмотку, проводники которой равномерно уложены в пазах по всей окружности, с угловым расстоянием в 120 эл. градусов. Концы обмотки статора обычно соединяют по схемам «звезда» или «треугольник», и подключаются к сети питающего напряжения. Магнитопровод выполняется из электротехнической шихтованной (набрано из тонких листов) стали.
Как я уже сказал ранее, в асинхронном двигателе существует всего 2 типа роторов: это фазный тип ротора, и короткозамкнутый. Магнитопровод ротора также выполнен из шихтованной электротехнической стали. Короткозамкнутый ротор имеет вид так называемой «беличьей клетки» из-за схожести своей конструкции на эту клетку. Состоит эта клетка из медных стержней, которые накоротко замкнуты кольцами. Стержни непосредственно вставлены в пазы сердечника ротора. Для улучшения пусковых характеристики АД с таким типом ротора, применяют специальную форму паза, это дает возможность использования эффекта вытеснения тока, что влияет на увеличение активного сопротивления роторной обмотки при пуске (больших скольжения). Сами по себе, АД с короткозамкнутым ротором имеют малый пусковой момент, что пагубно сказывается на области их использования. Наибольшее распространение они нашли в системах которые не требуют больших пусковых моментов. Однако, данный тип ротора отличается тем, что на его обслуживание тратится меньше средств чем на обслуживание двигателя с фазным ротором, вследствие отсутствия физического контакта в типе ротора беличья клетка.
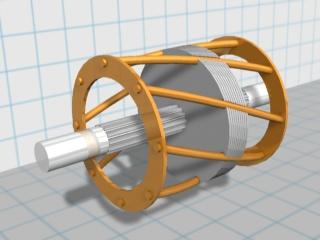
Рисунок 2 – Ротор АД «беличья клетка»
Фазный ротор состоит из трёхфазной обмотки, зачастую соединенной по схеме «звезда», и выведенную на контактные кольца, которые вращаются вместе с валом. Щетки выполнены из графита. Фазный ротор дает много преимуществ, таких как пуск звезда-треугольник, регулирование частоты вращения изменением сопротивления ротора.
Режимы работы
Подробнее рассмотреть механическую характеристику в моей ранней статье, а так же способы пуска с реверсом.
К тормозным режимам стоит отнести несколько основных:
– торможение противовключением;
– торможение однофазным переменным током и конденсаторное торможение;
– динамическое торможение.
Асинхронный двигатель имеет низкую стоимость, надёжен, и очень дешевый в обслуживании, особенно если он выполнен с короткозамкнутым ротором.