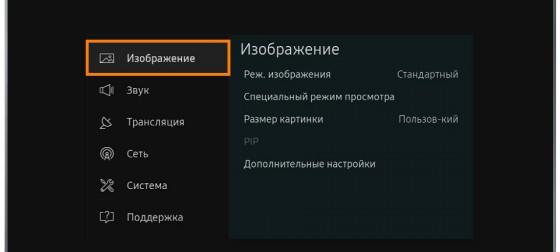
Калибровка регуляторов
Содержание:
- Калибровка квадртокоптера. Основные моменты
- Результат
- Выбор настроек регуляторов
- Когда необходима регулировка коптера
- Сборка из комплекта
- Как откалибровать квадрокоптер Syma X5C
- Калибровка квадрокоптера на основных режимах полёта
- Детали для дрона своими руками с камерой
- Сборка железа и его настройка
- Калибровка каждого регулятора
- Настройка прошивки и загрузка
- Детали
- Профессиональная калибровка квадрокоптера
- Виды калибровки
- Проводка
Калибровка квадртокоптера. Основные моменты
Существует два варианта действий:
- механическая (применяется при небольшом отклонении в полете, представляя собой обычное подкручивание регулятора, отвечающего за тягу в одну или другую сторону, который расположен между сервоприводом и тарелкой);
- автоматическая (предполагает настройку работы напрямую с пульта управления и проводится при необходимости сместить триммер на 5+ позиций).
Сама калибровка проводится следующим образом:
Если появились проблемы, то сбрасываем до нуля настройки. Для этого поставьте дрон на ровную горизонтальную площадку, включите его и потяните одновременно левый джойстик вниз, а правый налево. Сделайте паузу, необходимую для настройки гироскопа, а затем одновременно левый стик отведите вниз, а правый направо. дождавшись калибровки акселерометра
Обратим внимание, что калибровка невозможна на наклонной поверхности из-за неизбежных ошибок и необходимости повторно калибровать
Теперь попробуйте вновь запустить дрон и поднять его на высоту не меньше полуметра (ниже нет смысла, так как коптер будет удерживаться воздушной подушкой, образующейся при вращении винтов). Если проблема не исчезла, то требуется триммирование.
Достаточно простой процесс, позволяющий точно откалибровать движения дрона и обеспечить хорошую управляемость в полете
При выполнении процесса обращайте внимание на следующие правила:
- если квадрокоптер клонит влево, то триммировать по рудеру его нужно в правую сторону и наоборот;
- если при полете дрон кивает носом вперед, то триммируем назад и обратно.
Для оценки направления, требующего настройки, достаточно сделать разворот квадрокоптера на 360 градусов по любому из основных направлений. Для этого достаточно потянут правый стик в одну из сторон и нажать верхнюю кнопку.

Перед тем как начать триммирование квадрокоптера нужно помнить, что у современных дронов имеется два режима работы (высокий и низкий расходы энергии), поэтому важно оценить качество его работы в каждом из них по отдельности
Также обратите внимание на правильность сборки самого коптера, так как иногда пропеллеры не крутятся даже при полностью исправных моторах
Принципиально триммирование и настройка подобных дронов не отличается от описанной выше процедуры. Ее можно легко провести собственными силами с помощью инструкции, прилагаемой к коптеру
Также обратим внимание, что модели Syma оснащены устройством, контролирующим уровень заряда аккумулятора. При приближении последнего к критическому уровню дрон самостоятельно снижается до безопасной высоты, что предупредит его повреждение при полной разрядке и падении на землю
Про этот момент нужно обязательно помнить и если не удается произвести настройку квадрокоптера, то обратите внимание на уровень заряда.

Сам процесс калибровки и триммирования не отличается от моделей других производителей. Для начала нужно запустить дрон на высоту чуть выше полуметра и понаблюдать за ним. Если происходит самопроизвольное смещение, то нужно подкорректировать, учитывая следующие моменты:
- при вращении влево триммер под левым джойстиком управления нужно медленно сдвигать вправо до момента прекращения подобного движения и на оборот;
- при движении аппарата вперед или назад нужно передвигать триммер под правым джойстиком также в противоположном направлении.
Здравствуй, пилот! Калибровка квадрокоптера, или его триммирование, как ты, наверное, уже знаешь, важный этап его создания и использования. Бывает, что аппарат начинает вести себя не так, как ты этого хочешь. Это нужно срочно исправлять, и сегодня я расскажу тебе как это сделать. Располагайся поудобнее, погнали!
Так как это достаточно трудоёмкий процесс, пусть и простой, то будь готов к тому, что ты зависнешь на этом на несколько часов. (сложно будет особенно начинающим пилотам) Конечно, если ты хочешь добиться хорошего результата. Для начала нужно чётко понять с какой именно осью у тебя проблемы. Не иди методом научного тыка, он здесь не поможет.
Квадрик в полёте может вести себя неадекватно. Например, устройство может кренится в одну из сторон или вращаться вокруг своей оси. Здесь на помощь и приходит триммирование квадрокоптера. Она позволяет скорректировать поведение коптера через настройку контроллера.
Результат
Когда все прошло проверку, можно крепить пропеллеры, а потом попробовать взлететь. Для этого квадрокоптер стоит разместить подальше от себя, наклонить вниз и вправо левую ручку, а потом медленно добавить газа. Если прибор взлетел, это очень хорошо, а если он трясется, то придется настраивать PID. Это осуществляется в пункте PID Config. Делается это все в каждой ситуации индивидуально, то есть нет какого-то универсального решения. Теперь вам известно, как собрать квадрокоптер своими руками.
Если ваш квадрокоптер резко улетает в какую-либо сторону, дёргается или вообще теряет управление – эта статья для вас.
Сложно недооценить важность правильной предполётной подготовки квадрокоптера. Прежде чем взлететь, вы должны в первую очередь откалибровать гирокоптеры дрона
Кроме того, нужно связать с квадрокоптером пульт управления. И наконец, когда квадрокоптер уже поднимется в воздух, вам могут понадобиться дополнительные подстройки триммеров, чтобы тот мог зависнуть на одном месте. Этот процесс в целом одинаков для большинства недорогих квадрокоптеров.
Подготовка к полёту
1. Вставьте аккумулятор в квадрокоптер, но пока не включайте его (если у вашего дрона встроенная батарея, то пропустите этот пункт).
2. Разместите квадрокоптер на ровной поверхности
Очень важно, чтобы поверхность была без уклонов, иначе вам не удастся выполнить калибровку
3. Включите квадрокоптер. Вы можете также включить квадрокоптер, держа его в руках, но после включения вы должны немедленно поставить его на ровную поверхность. У большинства моделей синхронизация гироскопов начинается через несколько секунд после включения. Уберите руку и не трогайте квадрокоптер в течение десяти секунд. За это время гироскопы включатся и откалибруются.
Соединение пульта управления с квадрокоптером
Теперь настало время связать пульт управления с вашим квадрокоптером. В разных моделях этот процесс осуществляется по-разному, и возможно, вам придётся обратиться к инструкции. Однако для большинства недорогих моделей необходимы следующие действия.
3-осный (3-axis) квадрокоптер
Просто включите пульт и подождите около семи секунд. Он может издавать повторяющиеся сигналы. Длинный сигнал будет означать, что пульт связался с квадрокоптером.
6-осный (6-axis) квадрокоптер
Включите пульт управления. Поднимите стик газа вверх до максимума и опустите вниз. Вы услышите звуковой сигнал, который означает, что пульт был успешно привязан к квадрокоптеру.

Подстройка
Взлетите на несколько десятков сантиметров над землёй. Понаблюдайте, не смещается ли квадрокоптер вперёд-назад или вправо-влево. При этом игнорируйте любое движение, вызванное ветром.
Если квадрокоптер непроизвольно сдвигается в какую-либо сторону, исправьте это соответствующим триммером (назначение кнопок триммеров вы можете найти в инструкции). К примеру, если квадрокоптер “дрифтует” вправо, нажимайте левый триммер, пока дрифт не прекратится.
Кроме того, в любой момент вы можете перенастроить гироскопы. Для этого посадите квадрокоптер на ровную поверхность и сведите оба стика вниз-вправо. Для разных моделей может понадобиться разная комбинация (к примеру, свести оба стика влево или вниз друг к другу). Вы узнаете, что гироскопы перенастроены, когда светодиодная подсветка квадрокоптера несколько раз “моргнёт”.
Теперь пора переходить к полётам! Загляните в нашу – там вы найдёте много обучающих статей о том, как правильно управлять дроном.
Область применения этих летательных аппаратов в настоящее время значительно расширилась. Они стали необходимы везде – от осмотра катастроф в местности, куда невозможно добраться человеку, до использования их для съёмок различных развлечений. , благодаря имеющимся функциям (ГЛОНАСС, GPS), успешно применяются для получения фото- и видеосъёмок в чрезвычайных ситуациях в самых непредвиденных ракурсах.
Уже недалёк тот день, когда с помощью таких летательных аппаратов будет осуществляться доставка всевозможных видов груза. Большое значение для безаварийного их применения имеет своевременная калибровка квадрокоптера, которая так необходима для настройки различных полётных режимов.
Выбор настроек регуляторов
- Brake: OFF
. Торможение мотора после установки газа в «ноль». Может иметь значения включен/выключен - Battery Type: Ni-xx(NiMH or NiCd)
. Не выбираем типа батарей Li-Po, т.к. регулятор остановит моторы, когда напряжение аккумулятора просядет, а так хоть есть шанс попытаться посадить коптер. - CutOff Mode: Soft-Cut
. При плавном выключении мотора контроллер сбрасывает обороты постепенно. - CutOff Threshold: Low
. Мотор будет выключен только при достижении минимального напряжения на аккумуляторе. - Start Mode: Normal
. Выбираем среднее значение из доступных (золотая середина). Мягкий и жесткий старт не рекомендуется. - Timing: MEDIUM
. Параметр, от которого зависит мощность и КПД двигателя. Может находится в пределах от 0° до 30°. Физически это электрический угол опережения коммутации обмоток.
На данный момент процедуру калибровки регуляторов считаем выполненной. Пробовать запускать моторы пока не будем
, т.к. еще не произведена процедура первоначальной настройки контроллера.
Квадрокоптер представляет собой летающую платформу на радиоуправлении с четырьмя оснащенными пропеллерами. В состав таких аппаратов включается летающая многороторная платформа. В полете квадрокоптер занимает относительно поверхности земли горизонтальное положение, способен зависнуть над выбранным местом, перемещается в стороны, вверх и вниз. Наличие специального дополнительного оборудования позволяет квадрокоптеру осуществлять практически автономные полеты.
Когда необходима регулировка коптера
Существует ошибочное мнение, что правильно настроенный аппарат не нуждается больше в регулировке. А также, что каждый новый квадрокоптер – настроен правильно. Оба этих утверждения в корне не верны. Конечно, проводить настройку
регуляторов летательного аппарата перед каждым полетом вовсе не обязательно. Но сделать ее необходимо в следующих случаях:
- При покупке нового квадрокоптера – перед его использованием;
- При изменении конфигурации аппарата, замене или установке новых элементов;
- При перемещении GPS-модуля;
- Если у
квадрокоптера нарушена
стабилизация; - После падения или ремонта.
Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Как откалибровать квадрокоптер Syma X5C
Для начала изучите кнопки пульта управления, за что каждая отвечает, функционал. Включите коптер. Для этого переводим в режим «On» задвижку на самом дроне. Затем включаем пульт и тянем левый стик вниз (до упора).
Теперь наберите высоту и отследите, в каком направлении «заносит» ваш коптер. Если видите, что есть проблема, попробуйте сбросить настройки. Для этого нужно установить дрон на плоскую ровную площадку, включить, потянуть левый и правый стики вниз и налево. Подождите, пока настроится гироскоп. Затем сделайте то же самое, но направо (калибровка акселерометра).
Проведите повторный запуск коптера. Не помогло? Тогда приступаем к следующему этапу — триммированию (изменению оборотов мотора).
Триммирование квадрокоптера
Простые правила:
- По рудеру. Если коптер кренится в правую сторону, то нужно триммировать влево. И наоборот;
- По тангажу. Видите, что дрон при полете кивает вперед, триммируйте назад. Кренит назад — триммируйте вперед.
Попробуйте сделать «флип» — 360-градусный разворот коптера по любому из четырех основных направлений. Для этого нажимаем одновременно верхнюю кнопку, и тянем правый стик в необходимую сторону.
При триммировании важно помнить, что у разработчиками предусмотрена два режима расхода энергии (высокий — высокие обороты, низкий — слабые). В зависимости от того, как планируете использовать дрон, проверьте качество работы коптера на данных режимах
Часто во время калибровки Syma X5C возникает проблема с неправильной установкой лопастей. Моторы могут функционировать на 100% верно, а пропеллер не крутится. В данном случае необходимо учитывать схему сборки и инструкцию, которые прилагаются к устройству.
Какие кнопки есть на пульте управления Syma X5C

- Левый и правый стики (джойстики);
- Переключение режимов (слева от левого стика);
- Поворот на 360 градусов (справа наверху);
- Переключатель «вперед-назад» (слева от правого стика);
- Переключатель режимов (под правым стиком);
- Кнопка «вкл-выкл» (в центре, над дисплеем).
Здравствуй, пилот! Калибровка квадрокоптера, или его триммирование, как ты, наверное, уже знаешь, важный этап его создания и использования. Бывает, что аппарат начинает вести себя не так, как ты этого хочешь. Это нужно срочно исправлять, и сегодня я расскажу тебе как это сделать. Располагайся поудобнее, погнали!
Так как это достаточно трудоёмкий процесс, пусть и простой, то будь готов к тому, что ты зависнешь на этом на несколько часов. (сложно будет особенно начинающим пилотам) Конечно, если ты хочешь добиться хорошего результата. Для начала нужно чётко понять с какой именно осью у тебя проблемы. Не иди методом научного тыка, он здесь не поможет.
Квадрик в полёте может вести себя неадекватно. Например, устройство может кренится в одну из сторон или вращаться вокруг своей оси. Здесь на помощь и приходит триммирование квадрокоптера. Она позволяет скорректировать поведение коптера через настройку контроллера.
Калибровка квадрокоптера на основных режимах полёта
Для того чтобы правильно произвести настройку квадрокоптера, надо знать основные режимы полёта:
- Stabilize. В этом режиме автопилот, без применения стиков сам убирает крен и тангаж и приводит квадрокоптер к горизонту.
- AltHold. Режим выдерживания высоты. Считывая показания барометра, дрон выдерживает заданную высоту, стиком газа её корректируют с начальными показателями.
- Acro. Если не трогать стики, тангаж и крен остаются неизменными, чтобы их выровнять нужно перемещать стики в противоположную сторону.
- Auto. По данным GPS перемещение по путевым точкам.
- Loiter. Режим зависания. Аппарат выдерживает заданные координаты и высоту.
- Position. Режим зависания с помощью газа.
- Guided. Перелёт в заданный waypoint и нахождение в этой точке.
- Circle. Сохраняя радиус, перемещение вокруг заданной точки.
- RTL. Режим возврата на точку старта с посадкой или зависанием на двухметровой высоте над этой точкой.
- OF Loiter. Используя OpticalFlowSensor, выполняется режим зависания с ещё большей точностью.
- Drift. Самолётный режим с выдерживанием заданного курса.
- Sport. При выполнении съёмки, высота выдерживается автоматически вместе с углом крена.
- Land. Выполнение посадки.
Теперь зная основные режимы полёта, вполне понятно для чего необходима тщательная калибровка квадрокоптера.
Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка железа и его настройка
Если все, описанное выше, у вас имеется, то вполне можно начинать процессы сверления, паяния и скручивания. Раму можно делать так же, как было описано ранее, а можно проявить фантазию. Но тут важен лишь один момент: следите, чтобы расстояние от центра до концов лучей было абсолютно одинаковым, при этом пропеллеры во время вращения не должны задевать друг друга и центральную часть из фанеры, так как на ней размещаются все датчики, мозги, а также камера, если вы пожелаете. Установку датчиков следует производить на толстый скотч, резину или силикон, чтобы уменьшить вибрацию. В середине или на концах лучей можно закрепить пенопласт, плотный поролон или резиновые маячки, которые возьмут на себя функции шасси в момент приземления.
Калибровка каждого регулятора
1. Подключите один из регуляторов к приемнику на канал газа (обычно 3й канал).
2. Включите аппаратуру и установите уровень газа на максимум.
3. Подключите аккумулятор к коптеру.
4. Необходимо дождаться, чтобы регуляторы проиграли мелодию. После двух сигналов резко сбросить газ на минимум.
5. Сейчас вы должны услышать сигналы, по количеству соответствующие подключенной батарее (3 раза для 3S батареи, 4 раза для 4S батареи и т.д.), затем длинный сигнал от регуляторов, означающий, что обнаружен минимальный уровень газа и что калибровка завершена. Можно попытаться слегка повысить газ, чтобы запустить мотор.
6. Отключите батарею. Повторите шаги 1-5 для оставшихся регуляторов.
7. Если процесс пошел не так, то необходимо убедиться, что аппаратура выдает сигнал без реверса. По необходимости сделайте в аппаратуре реверс канала газа. Также необходимо попробовать снизить уровень газа триммером на 50%.
8. Уровень газа установить на минимум. Далее отсоединить аккумулятор, чтобы выйти из режима калибровки регуляторов.
- Многие регуляторы при включении с высоким уровнем газа входят в режим программирования. Уровень сигнала запоминается как максимальный. При перемещении стика газа с минимальное положение уровень сигнала запоминается как минимальный.
- Если после калибровки моторы не начинают вращаться одновременно или вращаются с разной скоростью, то калибровку необходимо повторить.
- Если не получается выполнить калибровку с использованием контроллера APM, то выполните ее вручную (вторым способом) для каждого регулятора.
- Для некоторых регуляторов процедура калибровки отличается. Читайте документацию по регулятору.
- Для более точной калибровки можно подключить все регуляторы одновременно к приемнику. В этом случае будет исключено влияние «плавания» сигнала аппаратуры.
Настройка прошивки и загрузка
Найти нужную прошивку на данный момент не представляет сложности, поэтому следует скачать подходящий архив и распаковать его. После того как прошивка в Arduino будет успешно загружена, можно осуществлять закачивание программы настройки, а потом замыкать контакт A5 с GND. Когда программа будет запущена, в меню Option следует выбрать COM-порт Arduino, а в меню Action — AC2 Setup
Важно, чтобы настройка квадрокоптера прошла успешно, а для этого вам необходимо четко следовать инструкциям, которые появятся перед вами после нажатия на огромную кнопку. В одном окошке от вас потребуется двигать ручки на пульте до максимальных и минимальных значений, а в другом окне появится просьба убедиться, что прибор стоит ровно, чтобы верно откалибровать датчики
Детали
Для начала вам потребуется 4 мотора плюс 1 запасной. Пропеллеры тоже стоит взять с запасом, должно быть минимум 2 стандартных и 2 — обратного вращения. 4 регулятора скорости, плюс несколько запасных. В качестве источника питания не стоит брать один суперёмкий аккумулятор, так как он будет только придавать лишний вес устройству. Правильнее всего предпочесть несколько мелких, чтобы менять их по очереди. Рама должна быть максимально прочной и легкой. Вариант, описанный выше, можно назвать вполне подходящим. В качестве мозгов и датчиков устройства можно использовать программируемый микроконтроллер, плата — AllInOne, акселерометр, гироскоп, управляющая арматура, аккумуляторы, зарядное устройство, а также многое другое. Под последним следует понимать необходимое количество болтиков, винтиков, проводочков, стяжек. Вам потребуются также инструменты для работы, такие как паяльник и принадлежности для работы с ним, дрель, а также умелые руки.
Профессиональная калибровка квадрокоптера
Наша компания предлагает услугу по настройке многовинтовых летательных аппаратов любого назначения. В зависимости от сферы использования, наши специалисты выполнят настройку
квадрокоптера таким образом, чтобы он был максимально отзывчивым и удобным для решения поставленных задач. Обычно услуга включает:
- Настройку электроники и аппаратуры управления;
- Настройку компаса, акселерометра и других датчиков;
- Настройку
регуляторов скорости двигателей; - Регулировку отзывчивости джойстиков (пульта управления);
- Прошивку или перепрошивку аппарата (в случае необходимости).
Правильно выполненная настройка
квадрокоптера делает его максимально управляемым в любом режиме полета.
Виды калибровки

- Механическая калибровка квадрокоптера
Механическая калибровка, это подкручивание регулятора тяги. Подкручиваешь регулятор, поднимаешь дрон, если проблема осталась – повторяешь. Используется тогда, когда отклонение от нужной оси не очень велико. - Автоматическая калибровка квадрокоптера
Автоматическая калибровка, это настройка работы дрона с пульта управления. Применяется, когда нужно сместить триммер на 5 и более позиций. Она происходит по-разному, в зависимости от пульта и контроллера. Придётся обратиться к инструкции. - С помощью ПО mission planer
Это программа для калибровки плат Ardupilot. Она позволяет программно задать нужные параметры. Как правило, калибровка через неё происходит перед первым запуском самодельного коптера.
Калибровка происходит следующим образом:
- Включаем передатчик радиоуправления (на момент калибровки регуляторов радиоуправление должно быть уже откалибровано). Выставляем ручку газа на максимум
- Берем Li-Po аккумулятор и подключаем к разъему Power-модуля для включения автопилота. Питание регуляторов соответственно тоже будет обеспечивать этот аккумулятор
- После включения APM будет мигать своими синими и красными светодиодами. Этим он сигнализирует готовность к калибровке при следующем включении. Отключаем аккумулятор от Power-модуля
- Включаем питание заново. Регуляторы издают стандартный звуковой сигнал (обычно количество сигналов равно количеству банок в батарее) и через некоторое время дважды издает короткий сигнал, что подтверждает калибровку по максимальному газу
- Опускаем ручку газа в минимальное положение. Регуляторы издают один долгий сигнал, что подтверждает калибровку по минимальному газу
- С этого момента калибровка регуляторов для APM 2.8 завершена и можно проверить работоспособность моторов
- Убираем газ на минимум и выключаем питание Ardupilot.
Проводка
Теперь пришло время перейти к проводке. Из четырех регуляторов скорости нужно спаять «паука», припаяв провода прямо в гнезда переходников.
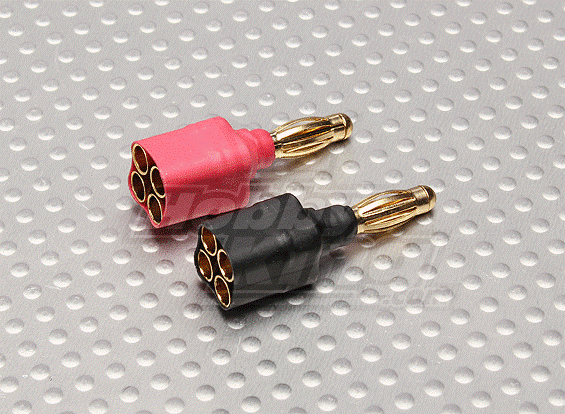
Согласно номерам моторов на плате, подключаем сигнальные провода драйверов. Если используется «плюсовая» схема полета, подключать их нужно к штырям М1-М4 (когда научитесь управлять, прошивку можно изменить).
Схема подключения приводится ниже:

В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.

Но, прежде, необходимо зарядить батарею, подключить ее и передатчик. Теперь время нажать вправо и вниз ручку газа. На плате должен загореться красным цветом СИД. Следующий момент – ручка газа передвинута вперед. Двигатели должны заработать, а квадрокопрет «отправиться» в полет.